WOLFRAM SYSTEM MODELER
MovingActuatedDriveDemonstrates usage of model Rotor1D mounted on a moving body |
|
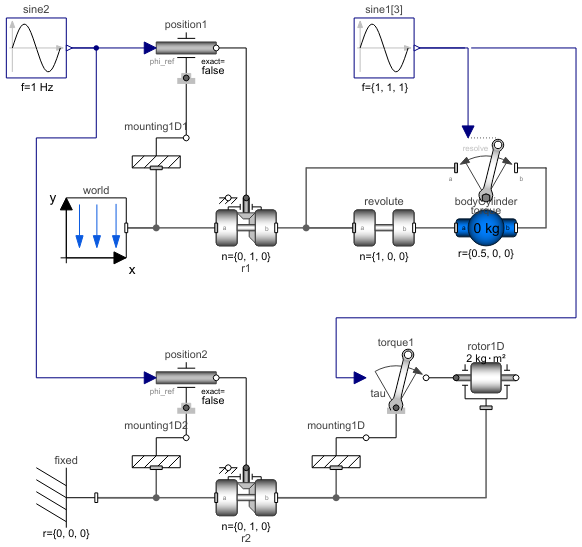
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Examples.Rotational3DEffects.MovingActuatedDrive"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
This model demonstrates how a moving drive train modelled with 3-dim. multi-body elements (revolute, bodyCylinder) can alternatively be modeled with component rotor1D to speed up simulation. The movement of the two systems is identical and also the cut-torques in the various frames (such as: r1.frame_b.t and r2.frame_b.t).
The driving joints (r1, r2) with rotation axis {0,1,0} are modelled to be driven by a motor torque along the {1,0,0} axis. Basically, this means that an idealized bevel gear is used to drive the axes of the revolute joints.
Components (16)
| bodyCylinder |
Type: BodyShape Description: Rigid body with mass, inertia tensor, different shapes for animation, and two frame connectors (12 potential states) |
|
|---|---|---|
| revolute |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| torque |
Type: Torque Description: Torque acting between two frames, defined by 3 input signals and resolved in frame world, frame_a, frame_b or frame_resolve |
|
| sine1 |
Type: Sine[3] Description: Generate sine signal |
|
| rotor1D |
Type: Rotor1D Description: 1D inertia attachable on 3-dim. bodies (3D dynamic effects are taken into account if world.driveTrainMechanics3D=true) |
|
| torque1 |
Type: Torque Description: Input signal acting as external torque on a flange |
|
| mounting1D |
Type: Mounting1D Description: Propagate 1-dim. support torque to 3-dim. system (provided world.driveTrainMechanics3D=true) |
|
| r1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| position1 |
Type: Position Description: Forced movement of a flange according to a reference angle signal |
|
| sine2 |
Type: Sine Description: Generate sine signal |
|
| mounting1D1 |
Type: Mounting1D Description: Propagate 1-dim. support torque to 3-dim. system (provided world.driveTrainMechanics3D=true) |
|
| r2 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| position2 |
Type: Position Description: Forced movement of a flange according to a reference angle signal |
|
| mounting1D2 |
Type: Mounting1D Description: Propagate 1-dim. support torque to 3-dim. system (provided world.driveTrainMechanics3D=true) |
|
| fixed |
Type: Fixed Description: Frame fixed in the world frame at a given position |