WOLFRAM SYSTEM MODELER
RollingWheelSetJoint (no mass, no inertia) that describes an ideal rolling wheel set (two ideal rolling wheels connected together by an axis) |
|
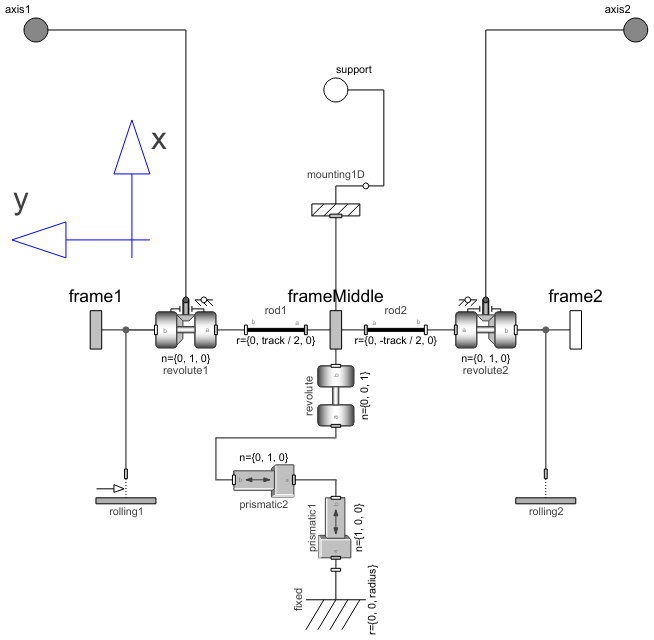
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica.Mechanics.MultiBody.Joints.RollingWheelSet"]
Out[1]:=

Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
An assembly joint for a wheelset rolling on the x-y plane of the world frame. The frames frame1 and frame2 are connected to rotating wheels; the frameMiddle moves in a plane parallel to the x-y plane of the world and should be connected to the vehicle body.
Note
To work properly, the gravity acceleration vector g of the world must point in the negative z-axis, i.e.
inner Modelica.Mechanics.MultiBody.World world(n={0,0,-1});
Parameters (4)
| animation |
Value: true Type: Boolean Description: = true, if animation of wheel set shall be enabled |
|---|---|
| radius |
Type: Radius (m) Description: Radius of one wheel |
| track |
Type: Distance (m) Description: Distance between the two wheels (= axle track) |
| stateSelect |
Value: StateSelect.default Type: StateSelect Description: Priority to use the generalized coordinates as states |
Connectors (6)
| frameMiddle |
Type: Frame_a Description: Frame fixed in middle of axis connecting both wheels (y-axis: along wheel axis, z-Axis: upwards) |
|
|---|---|---|
| frame1 |
Type: Frame_a Description: Frame fixed in center point of left wheel (y-axis: along wheel axis, z-Axis: upwards) |
|
| frame2 |
Type: Frame_b Description: Frame fixed in center point of right wheel (y-axis: along wheel axis, z-Axis: upwards) |
|
| axis1 |
Type: Flange_a Description: 1-dim. rotational flange that drives the joint |
|
| axis2 |
Type: Flange_a Description: 1-dim. rotational flange that drives the joint |
|
| support |
Type: Flange_b Description: Support of 1D axes |
Components (11)
| fixed |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
|---|---|---|
| rod1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| prismatic1 |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| prismatic2 |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| revolute |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| rod2 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| revolute1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| revolute2 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| rolling1 |
Type: RollingConstraintVerticalWheel Description: Rolling constraint for wheel that is always perpendicular to x-y plane |
|
| rolling2 |
Type: RollingConstraintVerticalWheel Description: Rolling constraint for wheel that is always perpendicular to x-y plane |
|
| mounting1D |
Type: Mounting1D Description: Propagate 1-dim. support torque to 3-dim. system (provided world.driveTrainMechanics3D=true) |
Used in Components (1)
|
Modelica.Mechanics.MultiBody.Parts Ideal rolling wheel set consisting of two ideal rolling wheels connected together by an axis |