WOLFRAM SYSTEM MODELER
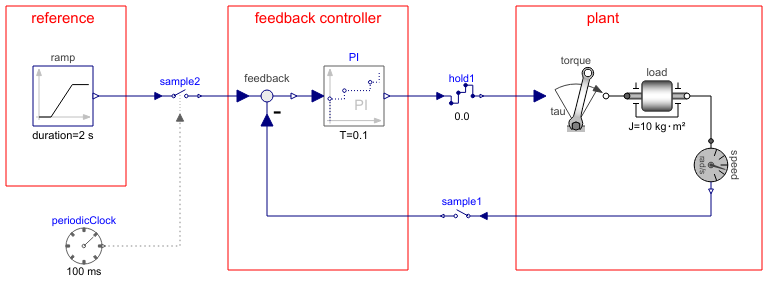
ExactlyClockedWithDiscreteControllerSimple controlled drive with discrete controller and exact periodic clocks (period is used in the controller) |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["Modelica_Synchronous.Examples.SimpleControlledDrive.ExactlyClockedWithDiscreteController"]
Out[1]:=
Information
This is the same model as ClockedWithDiscreteController. The only difference is that the clock is defined with an exact periodic clock and not with a Real periodic clock.
Components (10)
| load |
Type: Inertia Description: 1D-rotational component with inertia |
|
|---|---|---|
| speed |
Type: SpeedSensor Description: Ideal sensor to measure the absolute flange angular velocity |
|
| ramp |
Type: Ramp Description: Generate ramp signal |
|
| feedback |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| torque |
Type: Torque Description: Input signal acting as external torque on a flange |
|
| sample2 |
Type: SampleClocked Description: Sample the continuous-time, Real input signal and provide it as clocked output signal. The clock is provided as input signal |
|
| hold1 |
Type: Hold Description: Hold the clocked, Real input signal and provide it as continuous-time output signal (zero order hold) |
|
| sample1 |
Type: Sample Description: Sample the continuous-time, Real input signal and provide it as clocked output signal (clock is inferred) |
|
| PI |
Type: PI Description: Discrete-time PI controller with clocked input and output signals (for periodic and aperiodic systems using the parameterization of the continuous PI controller) |
|
| periodicClock |
Type: PeriodicExactClock Description: Generates a periodic clock signal with a period defined by an Integer number with resolution |