WOLFRAM SYSTEM MODELER
QuadraticSpeedDependentForceExternal force and torque acting at frame_b, defined by 3 input signals and resolved in world frame |
|
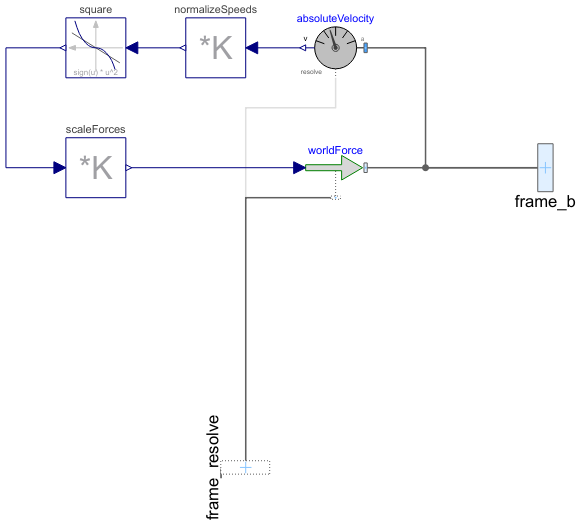
Diagram
Wolfram Language
In[1]:=
SystemModel["PlanarMechanics.Sources.QuadraticSpeedDependentForce"]
Out[1]:=
Information
A force applied on frame_b which is quadratic dependent on
the velocity of this frame. Both the measured velocity and the applied force
are resolved in the same frame which is defined via parameter
resolveInFrame as follows:
| Types.ResolveInFrameA. | Meaning |
|---|---|
| world | Resolve input force in world frame (= default) |
| frame_a | Resolve input force in frame_b |
| frame_resolve | Resolve input force in frame_resolve (frame_resolve must be connected) |
This model is e.g. suitable to simulate aerodynamic drag forces.
Parameters (9)
| resolveInFrame |
Value: Modelica.Mechanics.MultiBody.Types.ResolveInFrameA.world Type: ResolveInFrameA Description: Frame in which output vector r_rel shall be resolved (1: world, 2: frame_a, 3: frame_resolve) |
|---|---|
| F_nominal |
Type: Force (N) Description: Nominal force (if negative, torque is acting as load) |
| v_nominal |
Type: Velocity (m/s) Description: Nominal speed |
| tau_nominal |
Type: Torque (N⋅m) Description: Nominal torque (if negative, torque is acting as load) |
| w_nominal |
Type: AngularVelocity (rad/s) Description: Nominal speed |
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
| N_to_m |
Value: planarWorld.defaultN_to_m Type: Real (N/m) Description: Force arrow scaling (length = force/N_to_m) |
| Nm_to_m |
Value: planarWorld.defaultNm_to_m Type: Real (N⋅m/m) Description: Torque arrow scaling (length = torque/Nm_to_m) |
| zPosition |
Value: planarWorld.defaultZPosition Type: Length (m) Description: Position z of cylinder representing the fixed translation |
Inputs (3)
| diameter |
Default Value: planarWorld.defaultArrowDiameter Type: Diameter (m) Description: Has no longer an effect and is only kept for backwards compatibility (arrow visualization by Vector now) |
|---|---|
| color |
Default Value: PlanarMechanics.Types.Defaults.ForceColor Type: Color Description: Color of arrow |
| specularCoefficient |
Default Value: planarWorld.defaultSpecularCoefficient Type: SpecularCoefficient Description: Reflection of ambient light (= 0: light is completely absorbed) |
Connectors (2)
| frame_b |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque |
|
|---|---|---|
| frame_resolve |
Type: Frame_resolve Description: Coordinate system in which vector is optionally resolved, if useExtraFrame is true |
Components (6)
| planarWorld |
Type: PlanarWorld Description: Planar world model |
|
|---|---|---|
| absoluteVelocity |
Type: AbsoluteVelocity Description: Measure absolute velocity of origin of frame connector |
|
| worldForce |
Type: WorldForce Description: External force and torque acting at frame_b, defined by 3 input signals and resolved in world frame |
|
| normalizeSpeeds |
Type: MatrixGain Description: Output the product of a gain matrix with the input signal vector |
|
| scaleForces |
Type: MatrixGain Description: Output the product of a gain matrix with the input signal vector |
|
| square |
Type: SquaretimesSign Description: Output the squared input and retain the same sign of it |
Revisions
 Developed 2010 at the DLR Institute of System Dynamics and Control
Developed 2010 at the DLR Institute of System Dynamics and Control