WOLFRAM SYSTEM MODELER
WindTurbineGearBoxAssembly of a planetary gear and a three-shafted gearbox; Part I and Part II |
|
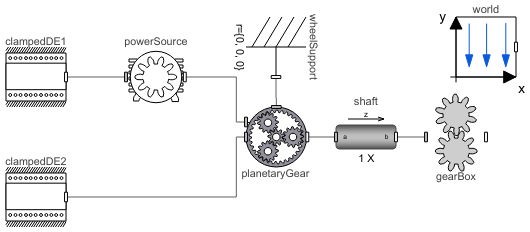
Diagram
Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.Examples.Gears.PlanetaryGears.WindTurbineGearBox"]
Out[1]:=
Information
Test Fidelity Limits: Complete Wind Turbine Gearbox
This example shows an assembly of a three-shaft gearbox and a planetary gearbox.
The rotor is mounted to the planet carrier, keeping an angular velocity around 19.3 rpm. The ring wheel is fixed. The sun wheel is connected to the shaft that leads to the gearbox. The outgoing shaft from this gearbox is driving a generator at 1500 rpm. The total gear ratio from start to finish is 77.8.
Figure 1 shows an example from a real-world wind turbine gearbox.
Be aware that this model is quite large and takes some time to simulate.
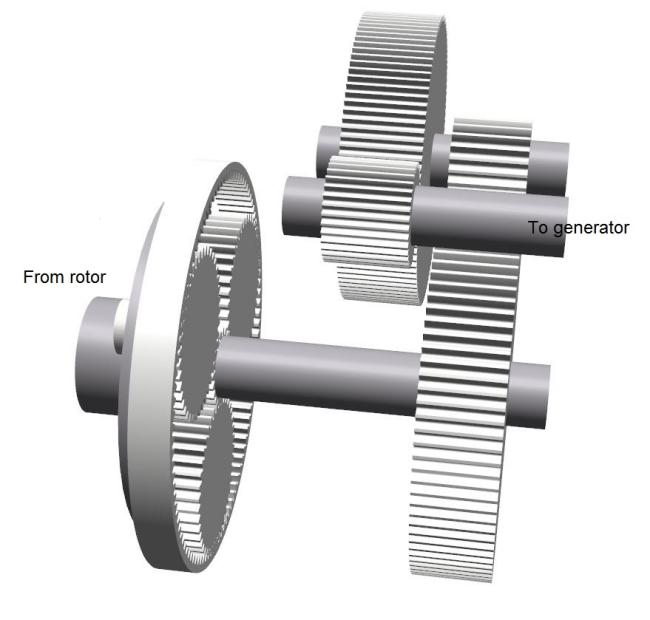
Figure 1: Wind turbine gearbox.
Figure 2 shows that there are small ripples in the planetary wheel because of the gear mesh configurations. This amplitude and its frequency may vary by the backlash and shaft speeds.
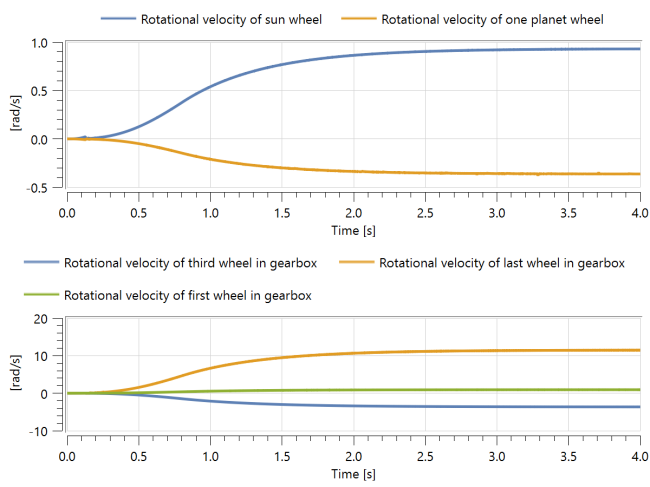
Figure 2: Rotational speeds.
Note that the solver step size is set very tigh so that it helps the solver to converge after integration steps.
Parameters (15)
| GearRatio |
Value: z2 * z4 * zs / (z1 * z3 * (zr + zs)) Type: Real Description: Total gear ration for the whole gearbox |
|---|---|
| zs |
Value: 19 Type: Integer Description: Number of teeth for sunwheel |
| xs |
Value: 0 Type: Real Description: Profile shift for sunwheel |
| zp |
Value: 41 Type: Integer Description: Number of teeth for planetwheel |
| xp |
Value: 0 Type: Real Description: Profile shift for planetwheel |
| zr |
Value: 101 Type: Integer Description: Number of teeth for ringwheel |
| xr |
Value: 0 Type: Real Description: Profile shift for ringwheel |
| z1 |
Value: 94 Type: Integer Description: Number of teeth for gearwheel 1 |
| x1 |
Value: 0 Type: Real Description: Profile shift for gearwheel 1 |
| z2 |
Value: 24 Type: Integer Description: Number of teeth for gearwheel 2 |
| x2 |
Value: 0 Type: Real Description: Profile shift for gearwheel 2 |
| z3 |
Value: 107 Type: Integer Description: Number of teeth for gearwheel 3 |
| x3 |
Value: 0 Type: Real Description: Profile shift for gearwheel 3 |
| z4 |
Value: 34 Type: Integer Description: Number of teeth for gearwheel 4 |
| x4 |
Value: -0.2 Type: Real Description: Profile shift for gearwheel 4 |
Components (8)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| planetaryGear |
Type: PlanetaryGear Description: Class containing a basic planetary gear model |
|
| wheelSupport |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| shaft |
Type: CylindricalBeam Description: Class with a flexible cylindrical beam |
|
| gearBox |
Type: Gearbox Description: This component is a three-shaft gearbox and is a part of the wind turbine gearbox |
|
| clampedDE2 |
Type: ClampedDriveEnd Description: Component that can act as a clamped drive end to a beam, containing different options |
|
| clampedDE1 |
Type: ClampedDriveEnd Description: Component that can act as a clamped drive end to a beam, containing different options |
|
| powerSource |
Type: Motor Description: Class for applying a torque to generate a desired angular velocity |