WOLFRAM SYSTEM MODELER
RollerAssemblyModel of an assembly of rollers, containing RollerPart components |
|
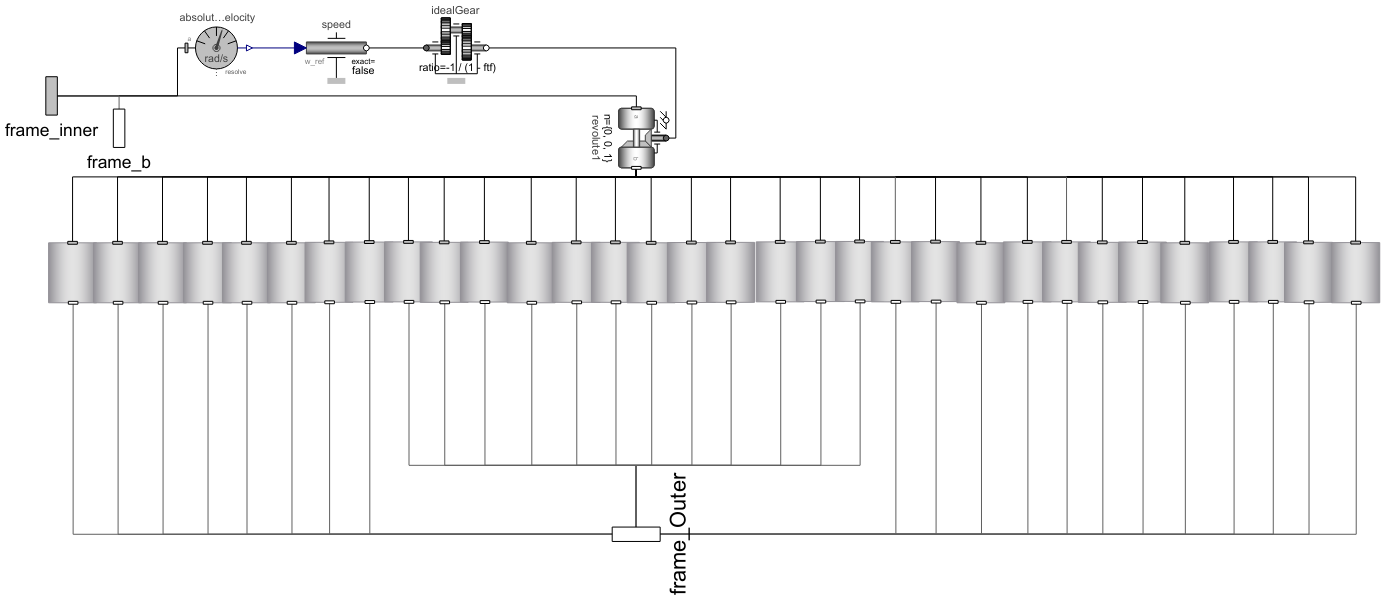
Diagram
Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.RollingBearings.Parts.RollerAssembly"]
Out[1]:=

Information
Roller Assembly
The number of rolling elements can be chosen arbitrarily in this model. The size of the cage will be adjusted accordingly to give correct clearance for each roller. The rotational speed of the roller is calculated explicitly to give the ideal rotational speed; i.e. it is not the friction forces that drive the rotation of the rollers. This is normally only a limitation for large bearings when smearing needs to be taken into account, when the roller element comes from an unloaded zone into a loaded zone.
For details of how the rollers are implemented, see the documentation of the RollerPart class.
It is also possible to simulate an outer ring bearing defect. A force is added around "twelve o’clock". It is applied as a powered-by-2 function. The size of the force is addForceOuterRingDefectAmplitude.
Following is a graphic showing how only the roller assembly will look with 12 rollers (missing cage, outer and inner ring).
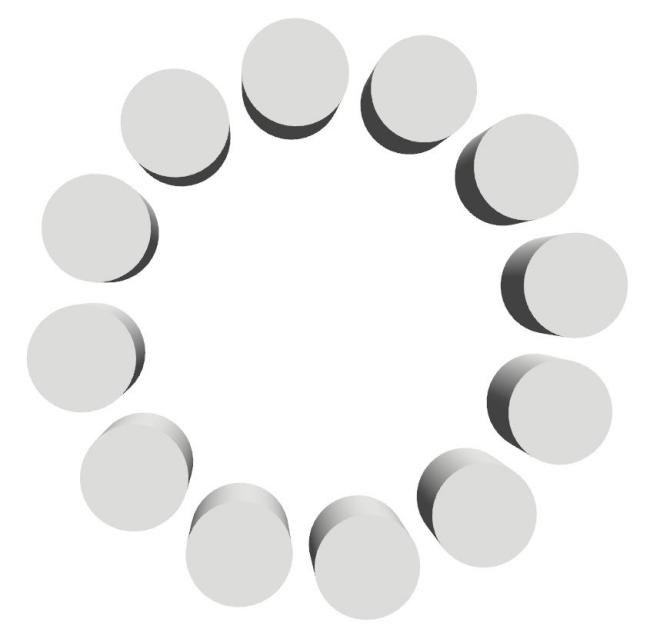
Figure 1: Roller assembly.
Parameters (19)
| d |
Type: Diameter (m) Description: Bearing inner (bore) diameter |
|---|---|
| D |
Type: Diameter (m) Description: Bearing outer diameter |
| B |
Type: Distance (m) Description: Bearing width |
| d1 |
Type: Diameter (m) Description: Bearing innerring wall outer diamter |
| D1 |
Type: Diameter (m) Description: Outer diameter for roller |
| F |
Type: Diameter (m) Description: Inner diameter for roller |
| s |
Type: Distance (m) Description: Cage clearance |
| dRoller |
Type: Diameter (m) Description: Roller diameter |
| dLength |
Type: Distance (m) Description: Roller diameter |
| wallWidth |
Type: Distance (m) Description: Roller diameter |
| numberOfRollers |
Type: Integer Description: Number of rollers |
| ftf |
Value: F / (2 * F + 2 * dRoller) Type: Real Description: Cage defect frequency (FTF) |
| clearance_z |
Type: Length (m) Description: Clearance in z direction |
| clearance_dr |
Type: Length (m) Description: clearence in radial direction |
| outerRingDefect |
Value: false Type: Boolean Description: if = true, then an outer ring defect at 12 o´clock is present |
| addForceOuterRingDefectAmplitude |
Value: 0 Type: Force (N) Description: Magnutude of outer ring defect force. Only valid if outerRingDefect = true |
| animateRollers |
Value: true Type: Boolean Description: Animate rollers |
| animateRollerForce |
Value: true Type: Boolean Description: Animate roller forces |
| animateOuterRingForce |
Value: false Type: Boolean Description: Animate outer ring forces |
Connectors (3)
| frame_inner |
Type: Frame_a Description: Coordinate system fixed to the component with one cut-force and cut-torque (filled rectangular icon) |
|
|---|---|---|
| frame_b |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|
| frame_Outer |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
Components (37)
| rollerPart |
Type: RollerPart Description: Class describing a roller |
|
|---|---|---|
| rollerPart1 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart2 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart3 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart4 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart5 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart6 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart7 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart8 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart9 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart10 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart11 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart12 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart13 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart14 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart15 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart16 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart17 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart18 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart19 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart20 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart21 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart22 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart23 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart24 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart25 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart26 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart27 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart28 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart29 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart30 |
Type: RollerPart Description: Class describing a roller |
|
| rollerPart31 |
Type: RollerPart Description: Class describing a roller |
|
| revolute1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| idealGear |
Type: IdealGear Description: Ideal gear without inertia |
|
| absoluteAngularVelocity |
Type: AbsoluteAngularVelocity Description: Measure absolute angular velocity of frame connector |
|
| speed |
Type: Speed Description: Forced movement of a flange according to a reference angular velocity signal |
|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
Used in Components (1)
|
RotatingMachinery.RollingBearings.RollerBearings Roller bearing possible to parameterize with values corresponding |