WOLFRAM SYSTEM MODELER
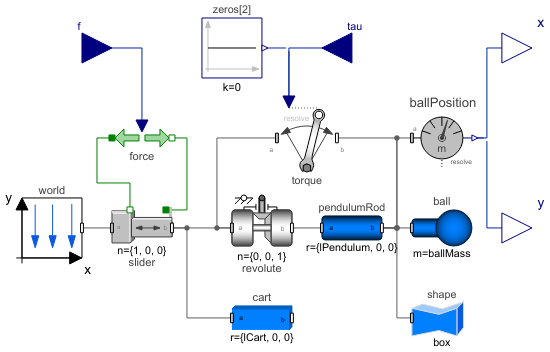
DrawingRobotPendulum attached to cart |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Control.DrawingRobot"]
Out[1]:=
Information
Wolfram Language Documentation Examples
This library contains models used in the documentation of system modeling functionality in Wolfram Language. These examples and this library can be explored in the Wolfram Language documentation.
Parameters (14)
| lCart |
Value: 0.1 Type: Length (m) Description: Cart length |
|---|---|
| wCart |
Value: 0.05 Type: Length (m) Description: Cart width |
| hCart |
Value: 2 * rBall Type: Height (m) Description: Cart height |
| lPendulum |
Value: 0.75 Type: Length (m) Description: Pendulum rod length |
| rPendulum |
Value: 0.0025 Type: Radius (m) Description: Pendulum rod radius |
| rBall |
Value: 0.037 Type: Radius (m) Description: Pendulum ball radius |
| rhoCart |
Value: 2703 Type: Density (kg/m³) Description: Cart density |
| rhoPendulum |
Value: 7750 Type: Density (kg/m³) Description: Pendulum rod density |
| rhoBall |
Value: 14139 Type: Density (kg/m³) Description: Pendulum ball density |
| cartMass |
Value: lCart * hCart * wCart * rhoCart Type: Mass (kg) Description: Cart mass |
| rodMass |
Value: Modelica.Constants.pi * rPendulum ^ 2 * lPendulum * rhoPendulum Type: Mass (kg) Description: Pendulum rod mass |
| ballMass |
Value: 4 / 3 * Modelica.Constants.pi * rBall ^ 3 * rhoBall Type: Mass (kg) Description: Pendulum ball mass |
| iBall |
Value: 8 / 15 * Modelica.Constants.pi * rhoBall * rBall ^ 5 Type: MomentOfInertia (kg⋅m²) Description: Pendulum ball inertia |
| pathTraceBoxSide |
Value: rBall / 2 Type: Length (m) Description: Side of box used for path tracing in animation |
Connectors (4)
| f |
Type: RealInput Description: Force applied to the cart |
|
|---|---|---|
| tau |
Type: RealInput Description: Torque applied to the pendulum |
|
| x |
Type: RealOutput Description: Component x of position of pendulum ball |
|
| y |
Type: RealOutput Description: Component y of position of pendulum ball |
Components (11)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| slider |
Type: Prismatic Description: Prismatic joint (1 translational degree-of-freedom, 2 potential states, optional axis flange) |
|
| revolute |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| cart |
Type: BodyBox Description: Rigid body with box shape. Mass and animation properties are computed from box data and density (12 potential states) |
|
| pendulumRod |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
| ball |
Type: Body Description: Rigid body with mass, inertia tensor and one frame connector (12 potential states) |
|
| shape |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
|
| ballPosition |
Type: AbsolutePosition Description: Measure absolute position vector of the origin of a frame connector |
|
| torque |
Type: Torque Description: Torque acting between two frames, defined by 3 input signals and resolved in frame world, frame_a, frame_b or frame_resolve |
|
| force |
Type: Force2 Description: Input signal acting as force on two flanges |
|
| zeros |
Type: Constant[2] Description: Generate constant signal of type Real |