WOLFRAM SYSTEM MODELER
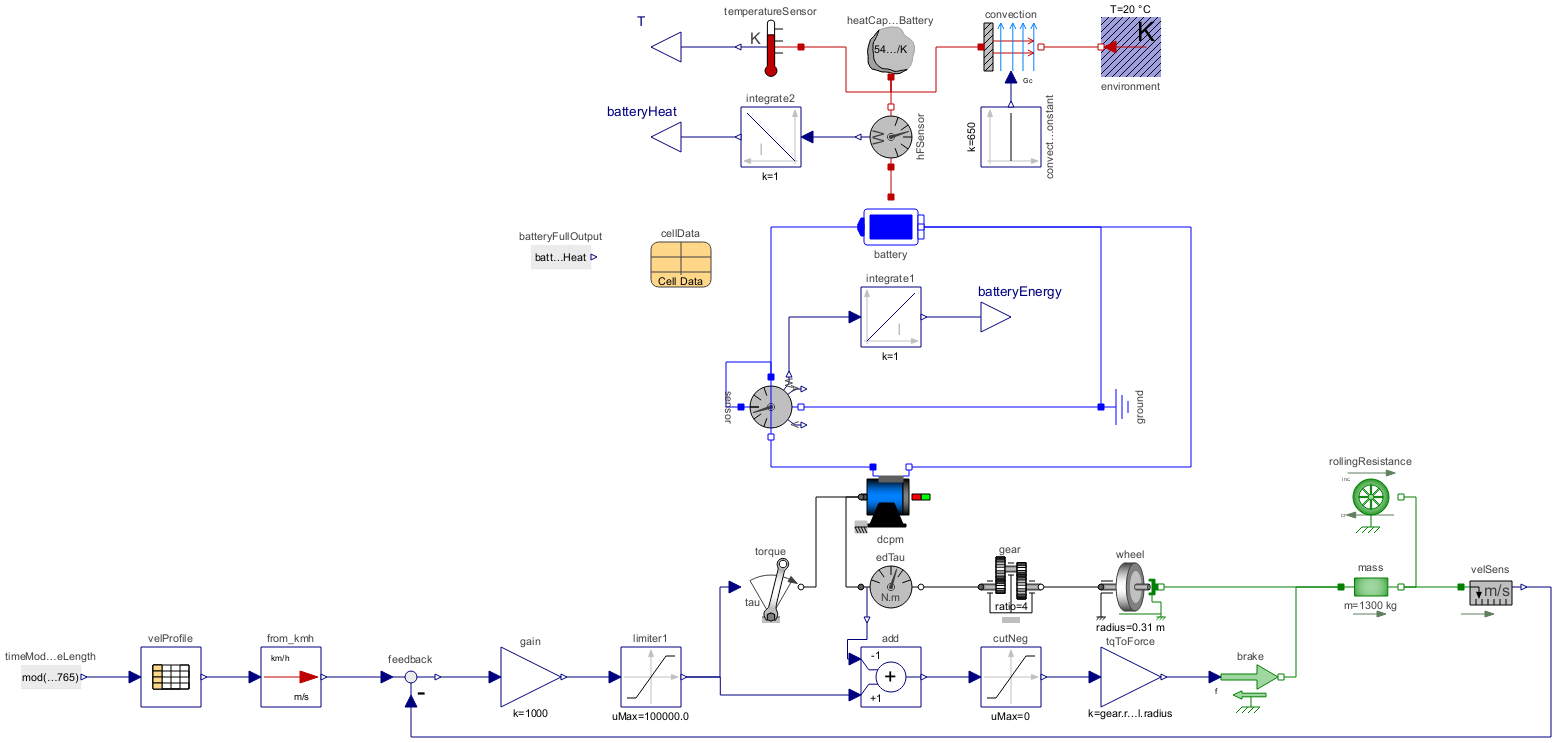
SimpleEVSimple toy model of an electric vehicle following the US EPA Highway Fuel Economy Driving Schedule (HWFET) |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["DocumentationExamples.Modeling.SimpleEV"]
Out[1]:=

Information
Wolfram Language Documentation Examples
This library contains models used in the documentation of system modeling functionality in Wolfram Language. These examples and this library can be explored in the Wolfram Language documentation.
Parameters (1)
| cellData |
Type: CellData Description: Parameters of the battery cell |
|---|
Connectors (3)
| T |
Type: RealOutput Description: 'output Real' as connector |
|
|---|---|---|
| batteryEnergy |
Type: RealOutput Description: 'output Real' as connector |
|
| batteryHeat |
Type: RealOutput Description: 'output Real' as connector |
Components (31)
| cellData |
Type: CellData Description: Parameters of the battery cell |
|
|---|---|---|
| battery |
Type: CellStack Description: Battery with open-circuit voltage dependent on state of charge, self-discharge and inner resistance |
|
| ground |
Type: Ground Description: Ground node |
|
| sensor |
Type: MultiSensor Description: Sensor to measure current, voltage and power |
|
| dcpm |
Type: DC_PermanentMagnet Description: Permanent magnet DC machine |
|
| heatCapacitorBattery |
Type: HeatCapacitor Description: Lumped thermal element storing heat |
|
| convection |
Type: Convection Description: Lumped thermal element for heat convection (Q_flow = Gc*dT) |
|
| environment |
Type: FixedTemperature Description: Fixed temperature boundary condition in Kelvin |
|
| temperatureSensor |
Type: TemperatureSensor Description: Absolute temperature sensor in Kelvin |
|
| hFSensor |
Type: HeatFlowSensor Description: Heat flow rate sensor |
|
| mass |
Type: Mass Description: Sliding mass with inertia |
|
| velSens |
Type: SpeedSensor Description: Ideal sensor to measure the absolute velocity of flange |
|
| brake |
Type: Force Description: External force acting on a drive train element as input signal |
|
| rollingResistance |
Type: RollingResistance Description: Resistance of a rolling wheel |
|
| gear |
Type: IdealGear Description: Ideal gear without inertia |
|
| wheel |
Type: IdealRollingWheel Description: Simple 1-dim. model of an ideal rolling wheel without inertia |
|
| edTau |
Type: TorqueSensor Description: Ideal sensor to measure the torque between two flanges |
|
| torque |
Type: Torque Description: Input signal acting as external torque on a flange |
|
| from_kmh |
Type: From_kmh Description: Convert from kilometre per hour to metre per second |
|
| feedback |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| gain |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| add |
Type: Add Description: Output the sum of the two inputs |
|
| tqToForce |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| limiter1 |
Type: Limiter Description: Limit the range of a signal |
|
| cutNeg |
Type: Limiter Description: Limit the range of a signal |
|
| velProfile |
Type: CombiTable1Ds Description: Table look-up in one dimension (matrix/file) with one input and n outputs |
|
| integrate1 |
Type: Integrator Description: Output the integral of the input signal with optional reset |
|
| integrate2 |
Type: Integrator Description: Output the integral of the input signal with optional reset |
|
| convectionConstant |
Type: Constant Description: Generate constant signal of type Real |
|
| timeModCycleLength |
Type: RealExpression Description: Set output signal to a time varying Real expression |
|
| batteryFullOutput |
Type: RealExpression Description: Set output signal to a time varying Real expression |