WOLFRAM SYSTEM MODELER
CarModel of a car with replaceable wheels and powertrain |
|
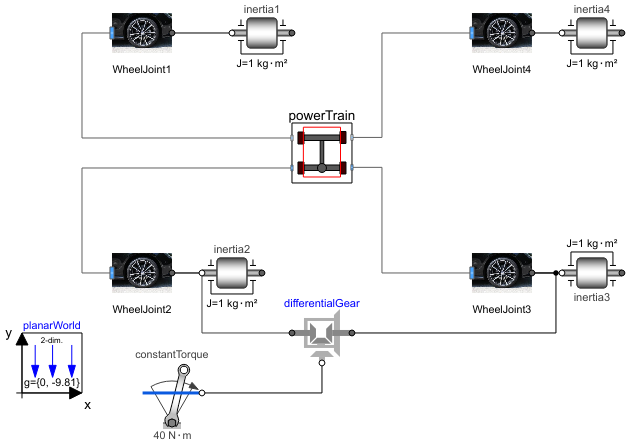
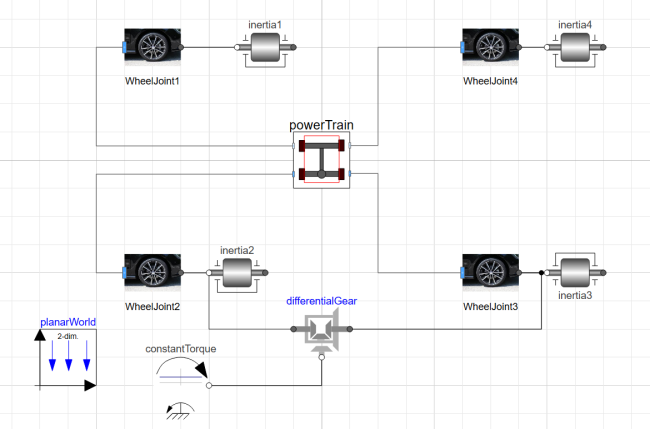
Diagram
Wolfram Language
In[1]:=
SystemModel["EducationExamples.MechanicalEngineering.SlidingCar.Car"]
Out[1]:=
Information
Library Dependency
This model requires the PlanarMechanics library.
- The free PlanarMechanics library was created especially for modeling multibody systems with two-dimensional mechanical components. Compared to the MultiBody library, currently available in the Modelica Standard Library, it is simpler to use and it is more optimized to planar modeling. Planar models of mechanical systems are useful in many different applications, for example, in contact problems that are more easily modeled in 2D than in 3D.
Model
This model shows the concept of configurable modeling. The wheels are defined as replaceable models and can easily be changed in the car model.
This model is based on the TwoTrackWithDifferentialGear example from the Planar Mechanics Library. The library can be downloaded here. Four wheels interact with the ground through a friction model. Depending on the type of wheel and ground, different friction coefficients are used. To switch between different setups, use the drop-down menu in the General tab.
Simulation
To simulate the model, click the Simulate button:
Plot the Results
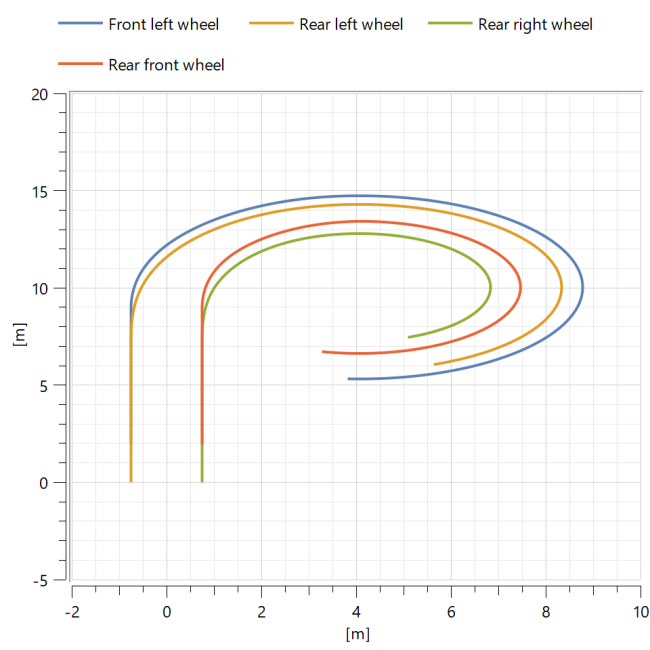
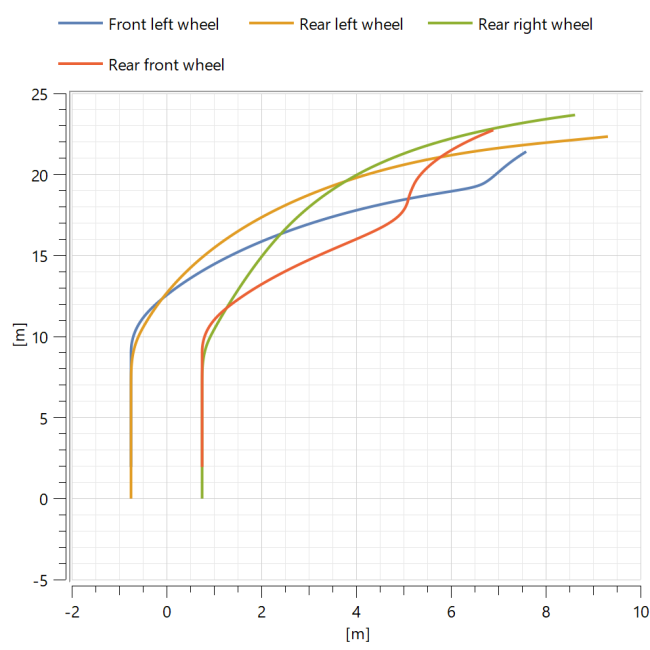
The simulation is set to run for 15 seconds. A constant torque is applied to the back wheels during the simulation. After 7 seconds, the front wheel will turn to the right over 3 seconds and then keep that front wheel angle for the rest of the simulation. See the position of the wheels of the car (as plotted below) or the forces on the wheels in the Model plots. The top plot shows the motion on asphalt and the bottom plot shows the motion on ice.
Automatic 3D Animation
PlanarMechanics and Multibody systems have visualizers to show what a real-world system would look like.
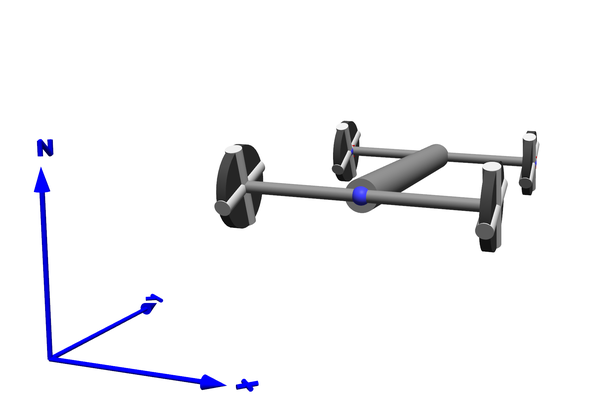
To show a 3D animation of the model, click the Animate button:
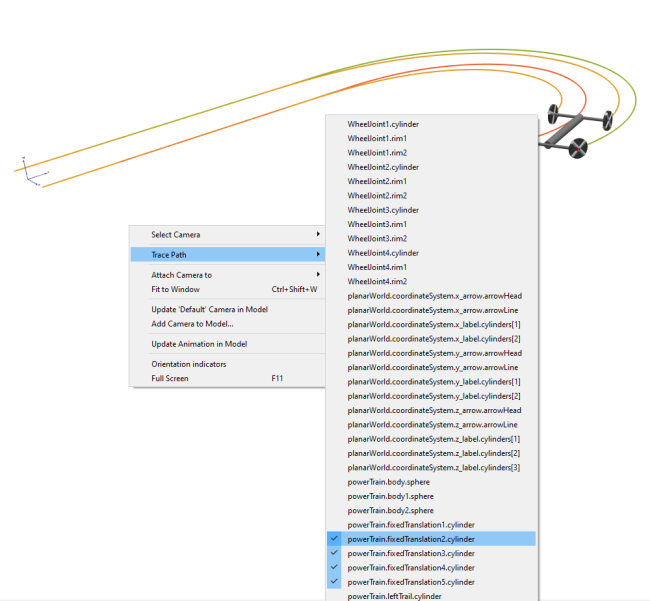
It is also possible to add traces to the wheels to see the path they have taken over time in the animation. To do this, right-click the background in the animation and choose Trace Path, and then choose the components to trace. One option is to trace the different cylinders 2–5 (powerTrain.fixedTranslation2.cylinder) as shown in the following image:
Changing the Wheels
By using the replaceable concept, we can redeclare the Wheel model and effectively change all four wheels of the car model with a drop-down menu.
Parameters (2)
| Wheel |
Replaceable Class Redeclared as: SummerTireOnAsphalt Description: Model of the wheels used in the car |
|---|---|
| PowerTrain |
Replaceable Class Redeclared as: PowerTrainSpeed Description: Model of the powertrain used in the car |
Components (12)
| planarWorld |
Type: PlanarWorld Description: Planar world coordinate system + gravity field + default animation definition |
|
|---|---|---|
| WheelJoint1 |
Type: Wheel Description: Model of the wheels used in the car |
|
| WheelJoint2 |
Type: Wheel Description: Model of the wheels used in the car |
|
| WheelJoint3 |
Type: Wheel Description: Model of the wheels used in the car |
|
| WheelJoint4 |
Type: Wheel Description: Model of the wheels used in the car |
|
| constantTorque |
Type: ConstantTorque Description: Constant torque, not dependent on speed |
|
| differentialGear |
Type: DifferentialGear Description: Simple Model of a differential gear |
|
| powerTrain |
Type: PowerTrain Description: Model of the powertrain used in the car |
|
| inertia4 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| inertia3 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| inertia2 |
Type: Inertia Description: 1D-rotational component with inertia |
|
| inertia1 |
Type: Inertia Description: 1D-rotational component with inertia |