WOLFRAM SYSTEM MODELER
BallBall subject to magnus forces. |
|
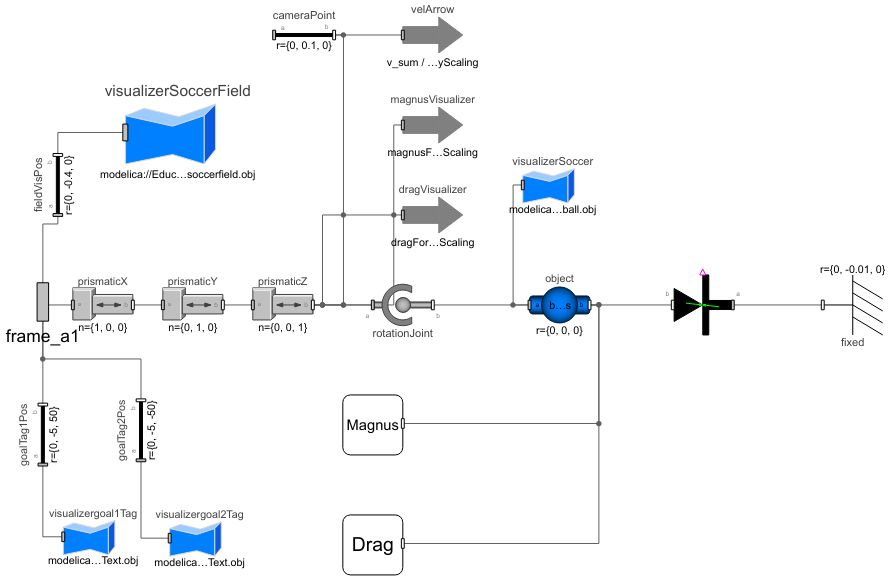
Diagram
Wolfram Language
In[1]:=
SystemModel["EducationExamples.Physics.FreeKick.Components.Ball"]
Out[1]:=
Information
Ball Component
The ball component consists of three prismatic joints and one spherical rotation joint connected to a Modelica Standard Library MultiBody bodyShape component. The bodyShape component is connected to a visualizer fixedShape, which animates the ball as a custom external 3D object. The two force components MagnusForce and DragForce are connected to the body and will provide forces in different directions, depending on the body.
Above is the diagram view of the Ball component. The black component connected to the ball is the SoftSupportingPlane component that models the ground. It is connected to a fixed point. There are additional visualizers in the model that visualize the soccer field and the goal tag.
Changing Ball Starting Conditions
To change the ball starting position from the corner position (r_0[3] = {-45, 0, -50}) to another position, in Simulation Center, open the Parameters tab and expand the ball tree. Here you can change the initial velocities, angular velocities, and position by changing the values for initVel, initAngVel, and initPos. Keep in mind that the y coordinate has to be zero at all times for initPos to make the ball start on the ground. A penalty kick would have the coordinates r_0[3] = {0, 0, -39}.
Parameters (6)
| ballMass |
Value: 0.425 Type: Mass (kg) Description: Mass of the ball |
|---|---|
| ballRadius |
Value: 0.11 Type: Length (m) Description: Radius of the ball |
| temp |
Value: 293.15 Type: Temperature (K) Description: Temperature of the air |
| initVel |
Value: {15, 5, 2} Type: Velocity[3] (m/s) |
| initAngVel |
Value: {0, 50, 10} Type: AngularVelocity[3] (rad/s) |
| initPos |
Value: {-45, 0, -50} Type: Position[3] (m) Description: Starting position of ball |
Connectors (1)
| frame_a1 |
Type: Frame_a Description: frame to the world component |
|---|
Components (20)
| object |
Type: BodyShape Description: The object(ball) that is being kicked |
|
|---|---|---|
| prismaticX |
Type: Prismatic Description: Prismatic joint in the x direction |
|
| prismaticY |
Type: Prismatic Description: Prismatic joint in the y direction |
|
| dragForce |
Type: DragForce Description: Component that calculates the drag force |
|
| magnusForce |
Type: MagnusForce Description: Component that calculates the Magnus force |
|
| prismaticZ |
Type: Prismatic Description: Prismatic joint in the z direction |
|
| rotationJoint |
Type: Spherical Description: Rotation joint to the ball |
|
| cameraPoint |
Type: FixedTranslation Description: A fixed translation from the ball that is not rotating, used as a camera point |
|
| fixed |
Type: Fixed Description: Fixed point to attach the supporting plane |
|
| velArrow |
Type: FixedArrow Description: Visualizer arrow for the ball velocity |
|
| softSupportingPlane |
Type: SoftSupportingPlane Description: Component used to model the ground |
|
| magnusVisualizer |
Type: FixedArrow Description: Visualizer for the magnus force |
|
| dragVisualizer |
Type: FixedArrow Description: Visualizer for the drag force |
|
| fieldVisPos |
Type: FixedTranslation Description: Fixed translation to put the soccer field in the correct position |
|
| goalTag2Pos |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| goalTag1Pos |
Type: FixedTranslation Description: Position of first goal tag |
|
| visualizergoal1Tag |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
|
| visualizergoal2Tag |
Type: FixedShape Description: Posittion of the second goal tag |
|
| visualizerSoccerField |
Type: FixedShape Description: Visualization of the soccer field |
|
| visualizerSoccer |
Type: FixedShape Description: Visualizer for the soccer ball |
Used in Examples (1)
|
EducationExamples.Physics.FreeKick Example model with a soccer ball being kicked from a corner position. |