WOLFRAM SYSTEM MODELER
PathPlanning1Generate reference angles for fastest kinematic movement |
|
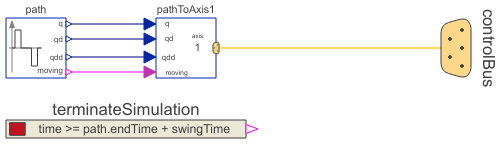
Diagram
Wolfram Language
In[1]:=

SystemModel["Modelica.Mechanics.MultiBody.Examples.Systems.RobotR3.Components.PathPlanning1"]
Out[1]:=
Information
This information is part of the Modelica Standard Library maintained by the Modelica Association.
Given
- start and end angle of an axis
- maximum speed of the axis
- maximum acceleration of the axis
this component computes the fastest movement under the given constraints. This means, that:
- The axis accelerates with the maximum acceleration until the maximum speed is reached.
- Drives with the maximum speed as long as possible.
- Decelerates with the negative of the maximum acceleration until rest.
The acceleration, constant velocity and deceleration phase are determined in such a way that the movement starts form the start angles and ends at the end angles. The output of this block are the computed angles, angular velocities and angular acceleration and this information is stored as reference motion on the controlBus of the r3 robot.
Parameters (8)
| angleBegDeg |
Value: 0 Type: Real (°) Description: Start angle |
|---|---|
| angleEndDeg |
Value: 1 Type: Real (°) Description: End angle |
| speedMax |
Value: 3 Type: AngularVelocity (rad/s) Description: Maximum axis speed |
| accMax |
Value: 2.5 Type: AngularAcceleration (rad/s²) Description: Maximum axis acceleration |
| startTime |
Value: 0 Type: Time (s) Description: Start time of movement |
| swingTime |
Value: 0.5 Type: Time (s) Description: Additional time after reference motion is in rest before simulation is stopped |
| angleBeg |
Value: Cv.from_deg(angleBegDeg) Type: Angle (rad) Description: Start angles |
| angleEnd |
Value: Cv.from_deg(angleEndDeg) Type: Angle (rad) Description: End angles |
Connectors (1)
| controlBus |
Type: ControlBus |
|---|
Components (3)
| path |
Type: KinematicPTP2 |
|
|---|---|---|
| pathToAxis1 |
Type: PathToAxisControlBus |
|
| terminateSimulation |
Type: TerminateSimulation |
Used in Examples (1)
|
Modelica.Mechanics.MultiBody.Examples.Systems.RobotR3 Model of one axis of robot (controller, motor, gearbox) with simple load |