WOLFRAM SYSTEM MODELER
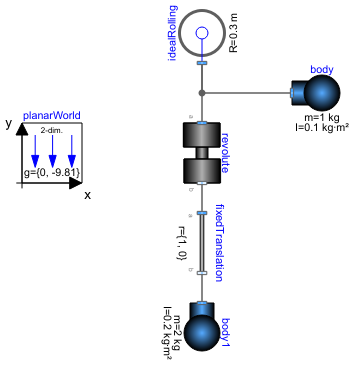
WheelBasedCranCrabA pendulum mounted on an ideal rolling wheel |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["PlanarMechanics.Examples.WheelBasedCranCrab"]
Out[1]:=
Information
This model contains non-holonomic constraints.
Selected continuous time states
- body1.frame_a.phi
- body1.r[1]
- body1.w
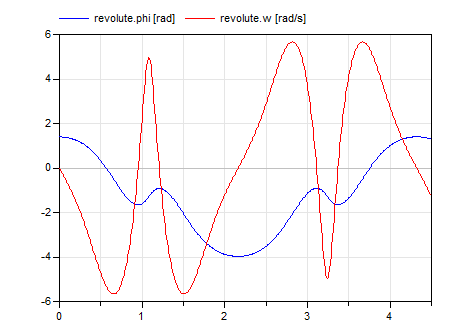
- revolute.phi
- revolute.w
Components (6)
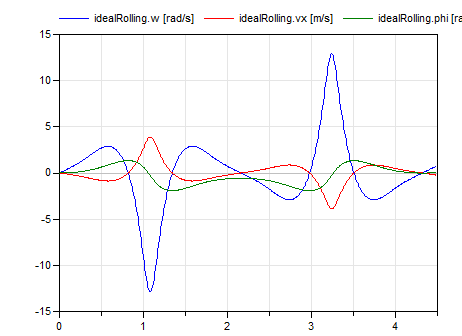
| idealRolling |
Type: IdealRolling |
|
|---|---|---|
| body |
Type: Body |
|
| revolute |
Type: Revolute |
|
| fixedTranslation |
Type: FixedTranslation |
|
| body1 |
Type: Body |
|
| planarWorld |
Type: PlanarWorld |
Revisions
 Developed 2010-2019 at the DLR Institute of System Dynamics and Control
Developed 2010-2019 at the DLR Institute of System Dynamics and Control