WOLFRAM SYSTEM MODELER
ExternalDampingA basic Jeffcott rotor with internal and external damping |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.Examples.JeffcottRotorDamping.ExternalDamping"]
Out[1]:=
Information
Rotor Vibration Reduction
This example inspects a vibrating rotor and shows how to reduce vibrations with additional external damping.
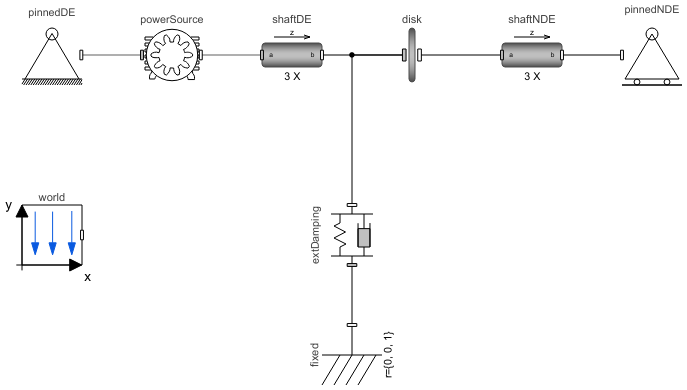
The Jeffcott rotor introduced in the Internal Damping example is used, but the shaft in this example is put in motion by a motor. The motor accelerates from 0 rpm to 244 rpm in 250 seconds.
The extDamping in Figure 1 must be disabled before simulating the model to see how the system behaves without additional damping.
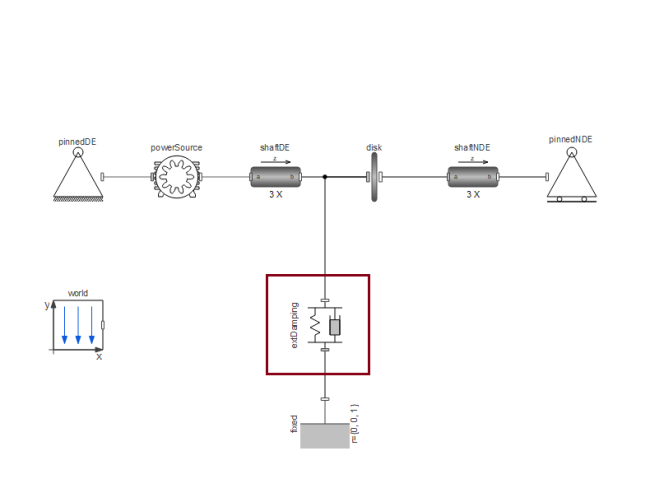
Figure 1: Jeffcott rotor with additional external damping
Upon plotting the disk deflection against the rotational speed, it is observed in Figure 2 that the machinery becomes unstable due to the resonance.
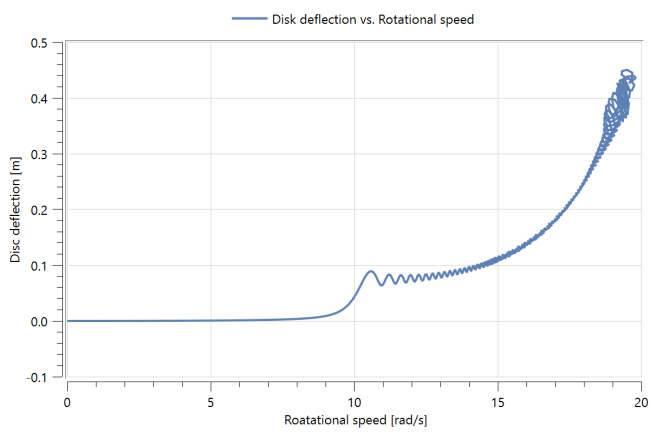
Figure 2: Disc frequency response without additional damping.
It is obvious that the machinery should not be run at 10 rad/s or higher speeds. Fortunately, the problem can be solved through the addition of external damping.
If the extDamping component is enabled and the simulation is run again, a noticable decrease of disc deflection is observed; see Figure 3.
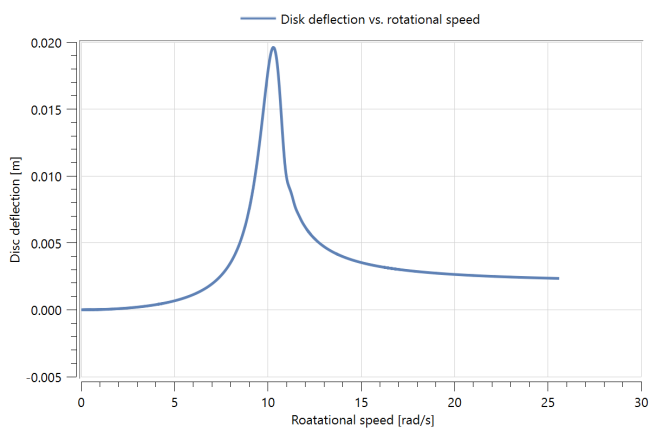
Figure 3: Disc frequency response.
The effect of doubling the damping is illustrated in Figure 4.
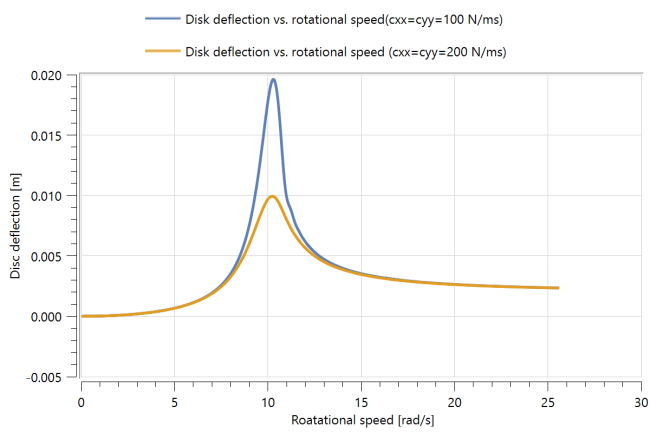
Figure 4: Frequency response comparison of external damping.
The resonance frequency can be shifted slightly by changing the internal damping value (phase lag). Increasing the external damping can solve the problem if the deflection magnitude is the problem. Note that higher damping means higher energy dissipation.
More information on damping of a system can be seen in this blog.
Parameters (2)
| cxx |
Value: 100 Type: TranslationalDampingConstant (N⋅s/m) Description: Damping constant (x direction) |
|---|---|
| cyy |
Value: 100 Type: TranslationalDampingConstant (N⋅s/m) Description: Damping constant (y direction) |
Components (9)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| pinnedDE |
Type: PinnedDriveEnd Description: Component that can act as a pinned drive end to a beam, containing different options |
|
| pinnedNDE |
Type: PinnedNonDriveEnd Description: Component that can act as a pinned non-drive end to a beam, containing different options |
|
| shaftDE |
Type: CylindricalBeam Description: Class with a flexible cylindrical beam |
|
| shaftNDE |
Type: CylindricalBeam Description: Class with a flexible cylindrical beam |
|
| disk |
Type: Disk Description: Class with a disk and unblances |
|
| fixed |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| extDamping |
Type: SupportStiffnessDamping Description: Support that acts as a translational two-dimensional coupled spring damper |
|
| powerSource |
Type: Motor Description: Class for applying a torque to generate a desired angular velocity |