WOLFRAM SYSTEM MODELER
DiskClass with a disk and unblances |
|
Diagram
Wolfram Language
In[1]:=
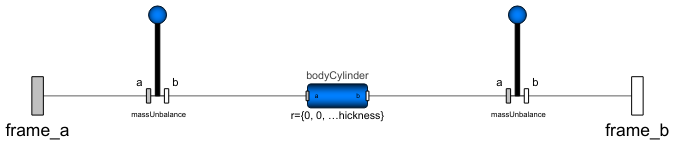
SystemModel["RotatingMachinery.Masses.Disk"]
Out[1]:=

Information
Disk
The rigid rotor disk has an offset from the the elastic centerline. The mass and polar moment of inertia of the disk are modeled with a bodyCylinder, while the unbalances are added in the frames [1].
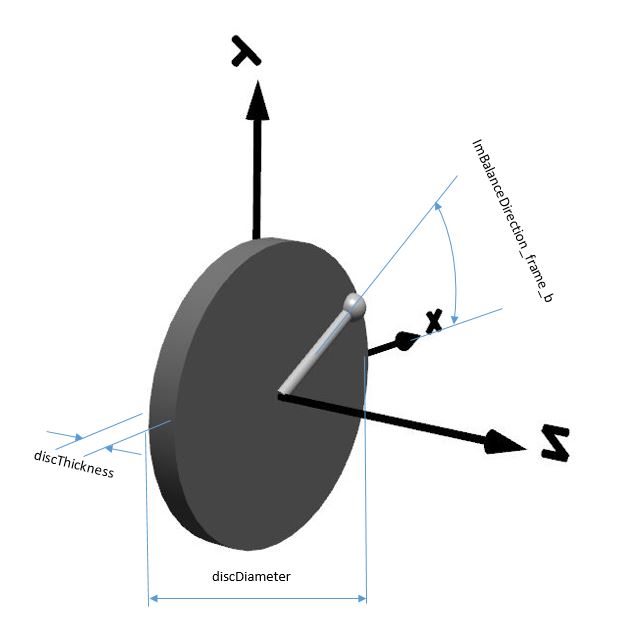
Figure 1: Disc with imbalance.
The disk component parameters are given in Figure 2. It is possible to model a disk including the mass unbalance by settting Unbalance parameters, i.e. size of the unbalance and position in the radial direction.
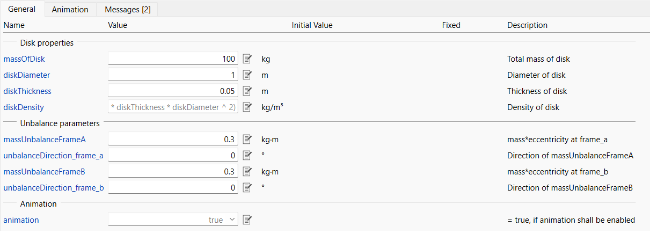 Figure 2: Disk parameters tab.
Figure 2: Disk parameters tab.
To be able to handle dynamic unbalances, it is possible to set the values of massUnbalance at both ends of the body cylinder.
The size of the mass unbalance is by default set by the parameter massUnbalance, i.e. size of the unbalance and position in radial direction. The unbalance force created will then be: unbalance * rotationalfrequency^2 [N].
References
[1] Ehrich, F. F . Handbook of Rotordynamics. McGraw-Hill, 1992.
Parameters (10)
| sphereDiameter |
Value: diskThickness Type: Diameter (m) Description: Diameter of sphere |
|---|---|
| massOfDisk |
Type: Mass (kg) Description: Total mass of disk |
| diskDiameter |
Type: Length (m) Description: Diameter of disk |
| diskThickness |
Type: Length (m) Description: Thickness of disk |
| diskDensity |
Value: 4 * (massOfDisk - (massUnbalanceFrameA + massUnbalanceFrameB) / ((diskDiameter - sphereDiameter) / 2)) / (Modelica.Constants.pi * diskThickness * diskDiameter ^ 2) Type: Density (kg/m³) Description: Density of disk |
| massUnbalanceFrameA |
Value: 0 Type: Real (kg⋅m) Description: mass*eccentricity at frame_a |
| unbalanceDirection_frame_a |
Value: 0 Type: Angle_deg (°) Description: Direction of massUnbalanceFrameA |
| massUnbalanceFrameB |
Value: 0 Type: Real (kg⋅m) Description: mass*eccentricity at frame_b |
| unbalanceDirection_frame_b |
Value: 0 Type: Angle_deg (°) Description: Direction of massUnbalanceFrameB |
| animation |
Value: true Type: Boolean Description: = true, if animation shall be enabled |
Connectors (2)
Components (4)
| bodyCylinder |
Type: BodyCylinder Description: Rigid body with cylinder shape. Mass and animation properties are computed from cylinder data and density (12 potential states) |
|
|---|---|---|
| balancingWeightFrameA |
Type: BalancingWeight Description: Class with an unblance, normally to be used together with a disk |
|
| balancingWeightFrameB |
Type: BalancingWeight Description: Class with an unblance, normally to be used together with a disk |
|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
Used in Examples (10)
|
RotatingMachinery.Examples.StabilityAnalysis Finding whirling frequencies of a rotating shaft: Part I |
|
|
RotatingMachinery.Examples.StabilityAnalysis Finding whirling frequencies of a rotating shaft: Part II |
|
|
RotatingMachinery.Examples.JeffcottRotorDamping Determine shaft damping |
|
|
RotatingMachinery.Examples.JeffcottRotorDamping A basic Jeffcott rotor with internal and external damping |
|
|
RotatingMachinery.Examples.RotorBalancing An unbalanced rotor stabilized by balancing planes |
|
|
RotatingMachinery.Examples.ContactAnalysis Study of contact forces between a disk and a housing |
|
|
RotatingMachinery.Examples.ContactAnalysis Study of a running up clamped free rotor |
|
|
RotatingMachinery.Examples.ContactAnalysis Inspection of deflection of a free rotor without clearance |
|
|
RotatingMachinery.Examples.ContactAnalysis Calculation of deflection for a rotor with a surrounding and a clearance |
|
|
RotatingMachinery.Examples.ContactAnalysis Application of a running down rotor deflection with a clearance |