WOLFRAM SYSTEM MODELER
SlowingRotorClearanceApplication of a running down rotor deflection with a clearance |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.Examples.ContactAnalysis.SlowingRotorClearance"]
Out[1]:=
Information
Analyze Slowing-down Clamped Rotor
The vibrations of a running down motor with clearance are studied. When the rotor is running down from a high vibration (decreasing angular velocity), the behavior will be different compared to when it runs up. The reason for the lower vibration is that when contact occurs, the rotational speed is already lower than the "stiffer" resonance. In this case, all resonances are avoided. See the example RunningUpRotorClearance for a "running up" model.
Figure 1 shows all scenarios in the same plot:
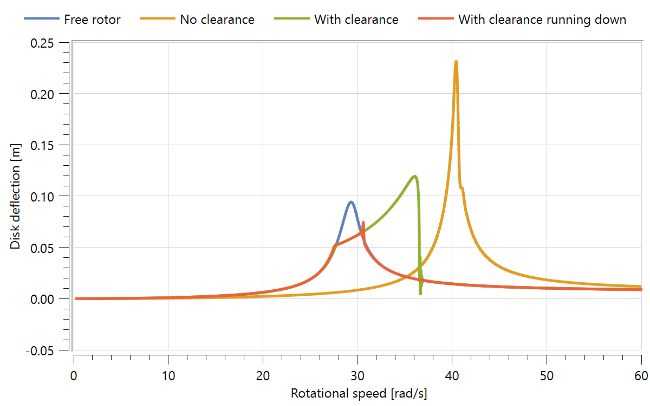
Figure 1: Comparison of disk deflections.
There are main differences between the running up (green curve) and running down (red curve) that need to be noted, even though the system is identical. The responses of the system vary significantly depending on whether it is running up or down. Therefore, the designer must make a wise choice regarding how much clearance to maintain between the housing and the rotor, based on the machinery's running speed.
Components (9)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| disk |
Type: Disk Description: Class with a disk and unblances |
|
| contact |
Type: ContactRing Description: Normal and friction contact forces between disk and housing |
|
| ground |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| shaft |
Type: CylindricalBeam Description: Class with a flexible cylindrical beam |
|
| flexibleSupport |
Type: SupportStiffnessDamping Description: Support that acts as a translational two-dimensional coupled spring damper |
|
| housing |
Type: Housing Description: Model of a flexible, damped housing with a stiff ring |
|
| clampedDE |
Type: ClampedDriveEnd Description: Component that can act as a clamped drive end to a beam, containing different options |
|
| powerSource |
Type: Motor Description: Class for applying a torque to generate a desired angular velocity |