WOLFRAM SYSTEM MODELER
ContactRingNormal and friction contact forces between disk and housing |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.Supports.ContactRing"]
Out[1]:=

Information
Contact model
The component calculates normal and friction contact forces between disk and housing. The forces are zero until the deflection is larger than the parameter GapShaftHousing.
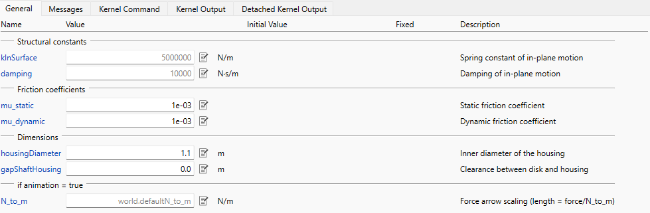 Figure 1: Contact parameters tab.
Figure 1: Contact parameters tab.
The stiffness and damping coefficients for the contact force in the normal direction are kInSurface and damping.
The friction coefficient has a static and a dynamic part. To avoid numerical problems, the friction behavior has been smoothened with the function TripleS_Func.
Parameters (7)
| kInSurface |
Value: 5000000 Type: Real (N/m) Description: Spring constant of in-plane motion |
|---|---|
| damping |
Value: 10000 Type: Real (N⋅s/m) Description: Damping of in-plane motion |
| mu_static |
Value: 0 Type: Real Description: Static friction coefficient |
| mu_dynamic |
Value: 0 Type: Real Description: Dynamic friction coefficient |
| housingDiameter |
Value: 1.1 Type: Real (m) Description: Inner diameter of the housing |
| gapShaftHousing |
Value: 0.05 Type: Real (m) Description: Clearance between disk and housing |
| N_to_m |
Value: world.defaultN_to_m Type: Real (N/m) Description: Force arrow scaling (length = force/N_to_m) |
Connectors (2)
Components (2)
Used in Examples (4)
|
RotatingMachinery.Examples.ContactAnalysis Study of contact forces between a disk and a housing |
|
|
RotatingMachinery.Examples.ContactAnalysis Inspection of deflection of a free rotor without clearance |
|
|
RotatingMachinery.Examples.ContactAnalysis Calculation of deflection for a rotor with a surrounding and a clearance |
|
|
RotatingMachinery.Examples.ContactAnalysis Application of a running down rotor deflection with a clearance |