WOLFRAM SYSTEM MODELER
RunningUpRotorClearanceCalculation of deflection for a rotor with a surrounding and a clearance |
|
Diagram
Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.Examples.ContactAnalysis.RunningUpRotorClearance"]
Out[1]:=
Information
Clamped Rotor with Clearence
This example studies vibrations for a run-up motor rotor with clearance.
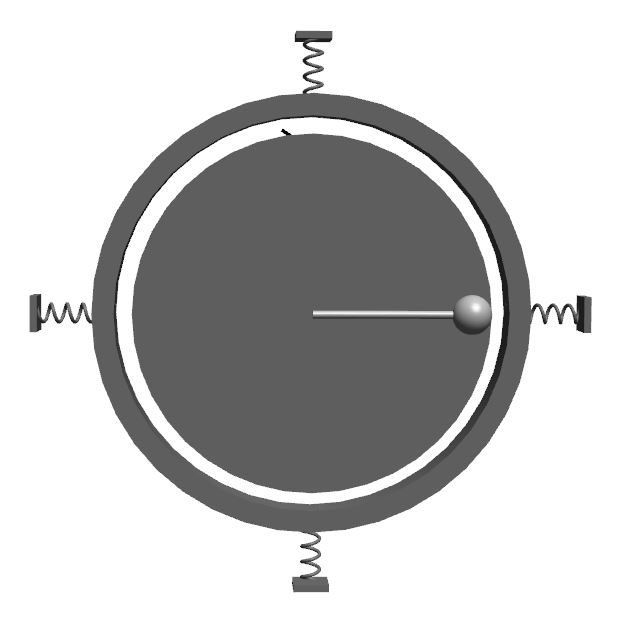
Figure 1: Clamped rotor with a disk.
Compared to the example NoClearance, this example has a clearance between the housing and the disk. This means that a contact will only occur if the disk starts vibrating enough to cause a deflection that is at least as big as the clearance.
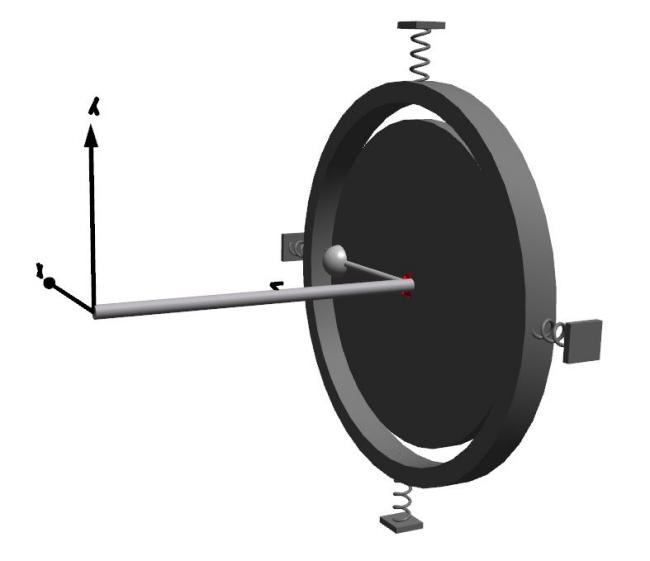
Figure 2: Clamped rotor with a disk (overview).
When the rotor is running up (increasing angular velocity), it behaves like the rotor without contact (see the example RunningUpNoContact for reference) until the deflection is equal to the clearance. Then, the system becomes stiffer, and a new resonance frequency occurs. In this example, it happens at 0.05 m.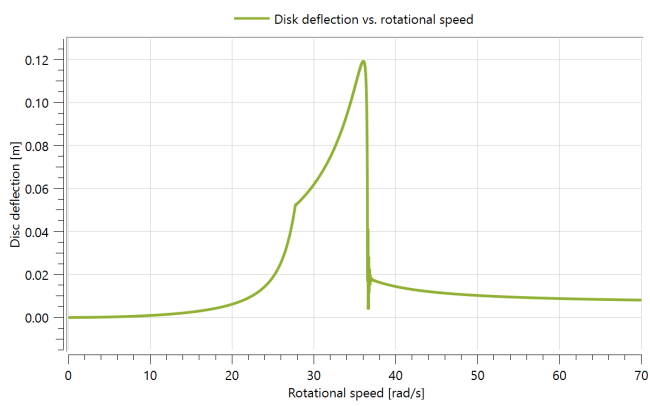
Figure 3: Disk deflections under increasing rotor speed.
The interesting thing here is what happens after the resonance at 36.5 rad/s. Then two possible solutions exist: either remain in contact or jump to the non-contact solution. As seen in Figure 3, the system jumps down to the non-contact solution.
Figure 4 shows three response curves. Blue is the free rotor, green is with clearance and orange is in contact all the time.
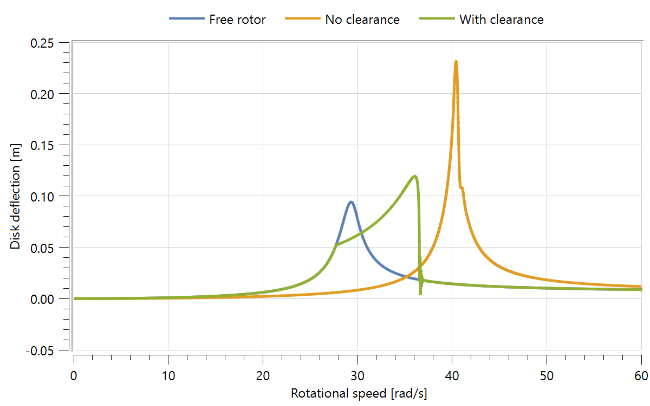
Figure 4: Comparison of disk deflections.
As the rotor starts running and picks up speed, it operates like a rotor without contact until the rotor deflection matches the clearance. Once this occurs, the system becomes stiffer, as the full contact between the rotor and the housing provides additional support. The increase in stiffness, in turn, leads to the emergence of a new resonance frequency. This phenomenon can be significant, as it can help reduce machinery vibrations at certain speeds. However, it is essential to estimate the running speed correctly, as miscalculations can lead to even more significant hazards for the machinery.
Components (9)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| disk |
Type: Disk Description: Class with a disk and unblances |
|
| contact |
Type: ContactRing Description: Normal and friction contact forces between disk and housing |
|
| ground |
Type: Fixed Description: Frame fixed in the world frame at a given position |
|
| shaft |
Type: CylindricalBeam Description: Class with a flexible cylindrical beam |
|
| flexibleSupport |
Type: SupportStiffnessDamping Description: Support that acts as a translational two-dimensional coupled spring damper |
|
| housing |
Type: Housing Description: Model of a flexible, damped housing with a stiff ring |
|
| clampedDE |
Type: ClampedDriveEnd Description: Component that can act as a clamped drive end to a beam, containing different options |
|
| powerSource |
Type: Motor Description: Class for applying a torque to generate a desired angular velocity |