WOLFRAM SYSTEM MODELER
LQControlModel of a LEGO Segway with an LQ controller keeping it upright |
|
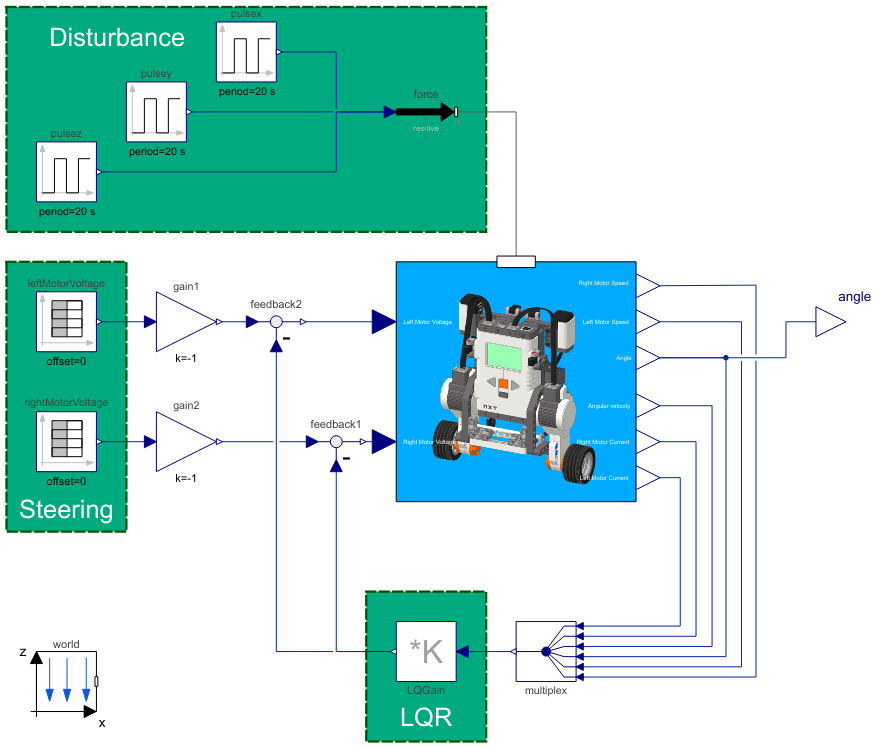
Diagram
Wolfram Language
In[1]:=
SystemModel["EducationExamples.ElectricalEngineering.LEGOSegway.LQControl"]
Out[1]:=
Information
This models a LEGO Segway kept upright by an LQ controller. The LQ controller is designed in Mathematica. For the model without a controller, open LEGOSegway.NoControl.
Simulation
To simulate the LEGO Segway and view a 3D animation of it, follow the steps below:
Click the Simulate buttom: 
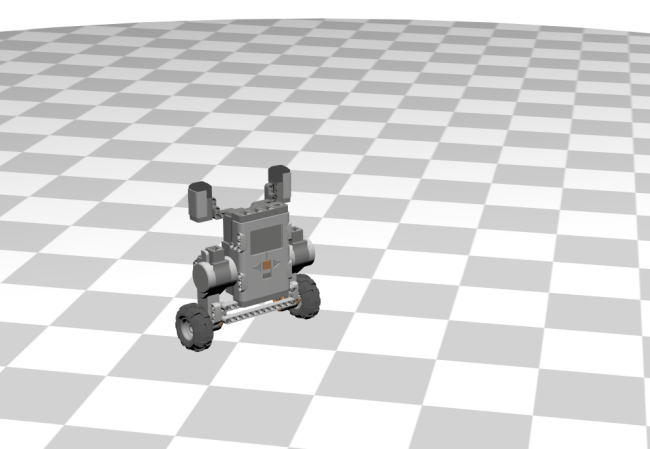
Click the Animate button: 
The result shows the LEGO Segway moving around, withstanding pushes applied at the top of the Segway.
Instant Plotting
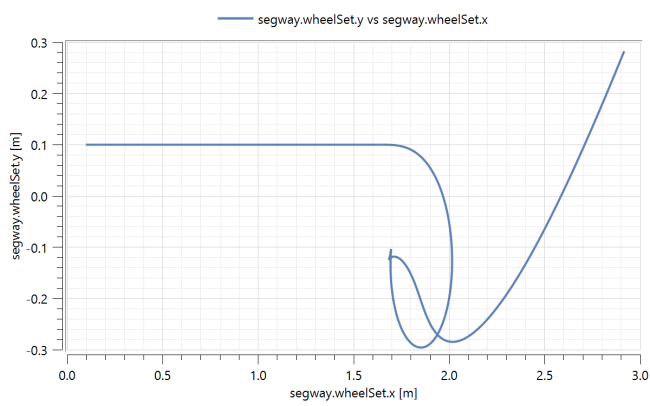
As soon as the simulation is done, a Model plot will be displayed, showing the path of the Segway:
There is also a Model plot the angle of the Segway. To view that, click on Segway angle in the Model Plots widget.
This will show the following plot:
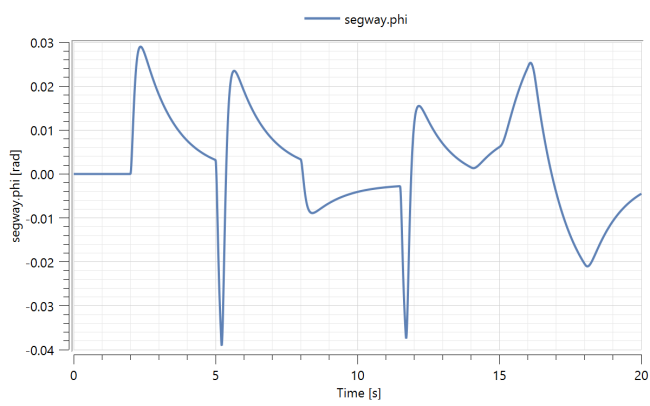
As you can see, the angle never deviates more than 0.08 rad, or 4.6°.
Create Custom Libraries
The model of this controlled Segway is built on custom components, modeling parts of the LEGO Mindstorms NXT 2.0 kit. For example, the model diagrams for the gyro, the motor, and one of the tires.
In order to get the full experience of this example, you need a desktop Wolfram Language product. A free trial download is available at www.wolfram.com/mathematica/trial/
For the full example, open the accompanying notebook LEGOSegway.nb.
Parameters (3)
| uMax |
Value: 8.5 Type: Voltage (V) |
|---|---|
| fMax |
Value: 0.31 Type: Force (N) |
| L |
Value: {{-0.317389999945665, -0.332770810105325, -189.012455398573, -19.1625910782731, 0.00986193616239615, 0.0175149167638231}, {-0.332770810116102, -0.317389999939135, -189.012455399932, -19.1625910784022, 0.0175149167639171, 0.00986193616242574}} Type: Real[2,6] Description: Gain matrix |
Connectors (1)
| angle |
Type: RealOutput Description: 'output Real' as connector |
|---|
Components (14)
| segway |
Type: LEGOSegwayModel Description: Contains a model of a LEGO Segway with some extra inputs and outputs |
|
|---|---|---|
| force |
Type: WorldForce Description: External force acting at frame_b, defined by 3 input signals and resolved in frame world, frame_b or frame_resolve |
|
| pulsex |
Type: Pulse Description: Generate pulse signal of type Real |
|
| pulsey |
Type: Pulse Description: Generate pulse signal of type Real |
|
| pulsez |
Type: Pulse Description: Generate pulse signal of type Real |
|
| leftMotorVoltage |
Type: TimeTable Description: Generate a (possibly discontinuous) signal by linear interpolation in a table |
|
| rightMotorVoltage |
Type: TimeTable Description: Generate a (possibly discontinuous) signal by linear interpolation in a table |
|
| feedback1 |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| feedback2 |
Type: Feedback Description: Output difference between commanded and feedback input |
|
| LQGain |
Type: MatrixGain Description: Output the product of a gain matrix with the input signal vector |
|
| multiplex |
Type: Multiplex6 Description: Multiplexer block for six input connectors |
|
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
| gain1 |
Type: Gain Description: Output the product of a gain value with the input signal |
|
| gain2 |
Type: Gain Description: Output the product of a gain value with the input signal |