WOLFRAM SYSTEM MODELER
LEGOSegwayModelContains a model of a LEGO Segway with some extra inputs and outputs |
|
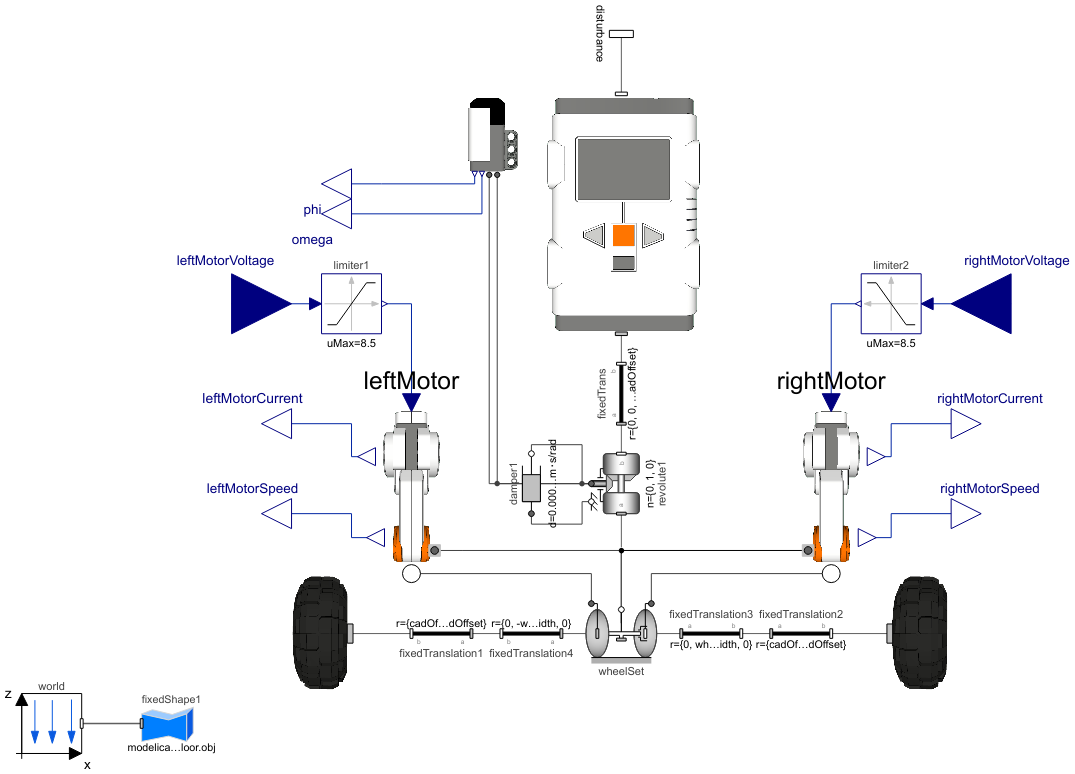
Diagram
Wolfram Language
In[1]:=

SystemModel["EducationExamples.ElectricalEngineering.LEGOSegway.Components.LEGOSegwayModel"]
Out[1]:=
Information
This model is of a standalone LEGO Segway. This model is used as a component in the models with control and without control.
Parameters (5)
| wheelRadius |
Value: 0.035 Type: Real |
|---|---|
| wheelDistance |
Value: 0.13 Type: Real |
| wheelWidth |
Value: 0.0133 Type: Real |
| cadOffset |
Value: -0.015 Type: Real |
| cadOffset2 |
Value: 0.002 Type: Real |
Connectors (9)
| leftMotorVoltage |
Type: RealInput Description: 'input Real' as connector |
|
|---|---|---|
| rightMotorVoltage |
Type: RealInput Description: 'input Real' as connector |
|
| omega |
Type: RealOutput Description: 'output Real' as connector |
|
| leftMotorSpeed |
Type: RealOutput Description: 'output Real' as connector |
|
| rightMotorSpeed |
Type: RealOutput Description: 'output Real' as connector |
|
| disturbance |
Type: Frame_b Description: Coordinate system fixed to the component with one cut-force and cut-torque (non-filled rectangular icon) |
|
| leftMotorCurrent |
Type: RealOutput Description: 'output Real' as connector |
|
| rightMotorCurrent |
Type: RealOutput Description: 'output Real' as connector |
|
| phi |
Type: RealOutput Description: 'output Real' as connector |
Components (18)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| wheelSet |
Type: RollingWheelSet Description: Ideal rolling wheel set consisting of two ideal rolling wheels connected together by an axis |
|
| smallLeftTire1 |
Type: SmallLeftTire Description: Models a LEGO tire |
|
| smallRightTire1 |
Type: SmallRightTire Description: Models a LEGO tire |
|
| fixedTranslation1 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixedTranslation2 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixedTranslation3 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| fixedTranslation4 |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| revolute1 |
Type: Revolute Description: Revolute joint (1 rotational degree-of-freedom, 2 potential states, optional axis flange) |
|
| rightMotor |
Type: Motor Description: A simplified voltage controlled motor |
|
| leftMotor |
Type: Motor Description: A simplified voltage controlled motor |
|
| brick1 |
Type: Brick Description: Models a LEGO CPU brick |
|
| fixedTrans |
Type: FixedTranslation Description: Fixed translation of frame_b with respect to frame_a |
|
| gyro1 |
Type: Gyro Description: Models a LEGO gyro sensor |
|
| damper1 |
Type: Damper Description: Linear 1D rotational damper |
|
| limiter1 |
Type: Limiter Description: Limit the range of a signal |
|
| limiter2 |
Type: Limiter Description: Limit the range of a signal |
|
| fixedShape1 |
Type: FixedShape Description: Visualizing an elementary shape with dynamically varying shape attributes (has one frame connector) |
Used in Components (1)
|
EducationExamples.ElectricalEngineering.LEGOSegway.Components Model of a LEGO Segway without a controller keeping it upright |