WOLFRAM SYSTEM MODELER
InvertedPendulumHardwareA LQR-controlled inverted pendulum system, controlled by external hardware using the ModelPlug library |
|
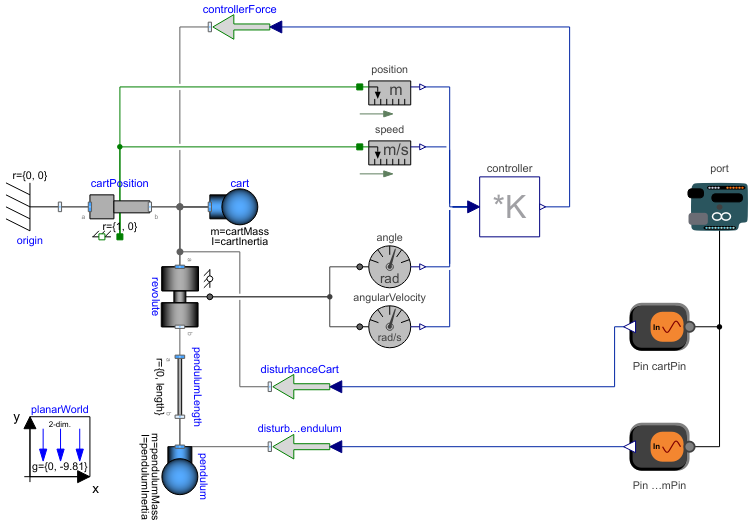
Diagram
Wolfram Language
In[1]:=
SystemModel["EducationExamples.MechanicalEngineering.InvertedPendulum.InvertedPendulumHardware"]
Out[1]:=

Information
Library Dependency
This model requires the ModelPlug and PlanarMechanics libraries.
- ModelPlug is a free Modelica library that allows you to link your simulation models to the real world by the use of an Arduino Board or any other board following the Firmata protocol). ModelPlug opens up a wide variety of ways to interact with your models, for example by using buttons, switches, input sensor information or even actuators such as motors and servos.
- The free PlanarMechanics library was created especially for modeling multibody systems with two-dimensional mechanical components. Compared to the MultiBody library, currently available in the Modelica Standard Library, it is simpler to use and it is more optimized to planar modeling. Planar models of mechanical systems are useful in many different applications, for example, in contact problems that are more easily modeled in 2D than in 3D.
Model
This model is a variation of the main example model. It uses connection to external hardware to control the magnitude of the disturbance forces.
External Connection
To run this model, you will need to connect an Arduino board to your computer and control the input to two analog pins, for example, thumbwheel potentiometers. Adjust the port of the Arduino component to the one used by your connected board with the Port parameter.
Parameters (12)
| cartMass |
Value: 1 Type: Mass (kg) Description: Mass of the cart (base of the pendulum) |
|---|---|
| cartInertia |
Value: 0.1 Type: Inertia (kg⋅m²) Description: Inertia of the cart (base of the pendulum) |
| pendulumMass |
Value: 0.5 Type: Mass (kg) Description: Mass at the top of the pendulum |
| pendulumInertia |
Value: 0.1 Type: Inertia (kg⋅m²) Description: Inertia at the top of the pendulum |
| angle0 |
Value: 0 Type: Angle (rad) Description: Initial angle of the pendulum |
| port |
Value: "COM4" Type: SerialPort Description: Name of the serial port |
| cartPin |
Value: 14 Type: Integer Description: Number of the analog pin |
| cartMinValue |
Value: -0.22 Type: Real Description: Minimum value when the ADC reads 0 |
| cartMaxValue |
Value: 0.5 Type: Real Description: Maximum value when the ADC reads 1024 |
| pendulumPin |
Value: 15 Type: Integer Description: Number of the analog pin |
| pendulumMinValue |
Value: -0.22 Type: Real Description: Minimum value when the ADC reads 0 |
| pendulumMaxValue |
Value: 0.5 Type: Real Description: Maximum value when the ADC reads 1024 |
Connectors (5)
| s |
Type: RealOutput Description: Absolute position of flange as output signal (position.s) |
|
|---|---|---|
| v |
Type: RealOutput Description: Absolute velocity of flange as output signal (speed.v) |
|
| phi |
Type: RealOutput Description: Absolute angle of flange as output signal (angle.phi) |
|
| w |
Type: RealOutput Description: Absolute angular velocity of flange as output signal (angularVelocity.w) |
|
| y |
Type: RealOutput[controller.nout] Description: Connector of Real output signals (controller.y) |
Components (18)
| pendulum |
Type: Body Description: Pendulum mass. |
|
|---|---|---|
| origin |
Type: Fixed Description: Center point. Reference point for cart. |
|
| cart |
Type: Body Description: Mass of cart. |
|
| planarWorld |
Type: PlanarWorld Description: Planar world coordinate system + gravity field + default animation definition |
|
| revolute |
Type: Revolute Description: Pendulum axis of rotation. |
|
| cartPosition |
Type: Prismatic Description: Translational position of cart. |
|
| angle |
Type: AngleSensor Description: Angle sensor for the pendulum. |
|
| controller |
Type: MatrixGain Description: LQ-regulator with optimal gains. |
|
| position |
Type: PositionSensor Description: Position sensor for the cart. |
|
| angularVelocity |
Type: SpeedSensor Description: Velocity sensor for the pendulum. |
|
| speed |
Type: SpeedSensor Description: Velocity sensor for the cart. |
|
| disturbancePendulum |
Type: WorldForce Description: Disturbance force applied on the pendulum. |
|
| disturbanceCart |
Type: WorldForce Description: Disturbance force applied on the cart. |
|
| pendulumLength |
Type: FixedTranslation Description: Length of the pendulum. |
|
| controllerForce |
Type: WorldForce Description: Corrective force applied to the cart. |
|
| cartInput |
Type: AnalogInput Description: Reads an analog signal from the specified pin |
|
| arduino |
Type: Arduino Description: Component with default configuration for Arduino boards |
|
| pendulumInput |
Type: AnalogInput Description: Reads an analog signal from the specified pin |