WOLFRAM SYSTEM MODELER
FrequencyAnalysisFrequency analysis of a bearing defect on a simple shaft mounted on a structure |
|
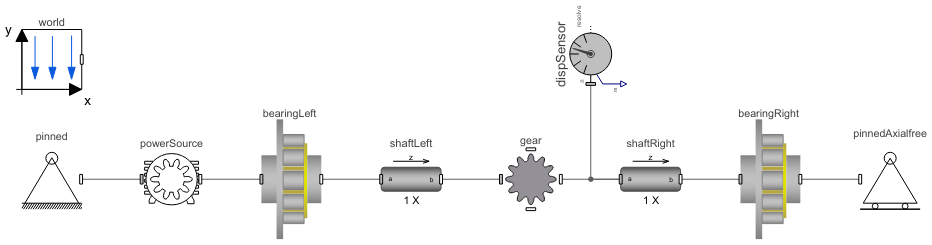
Diagram
Wolfram Language
In[1]:=
SystemModel["RotatingMachinery.Examples.BearingAnalysis.FrequencyAnalysis"]
Out[1]:=
Information
Frequency Analysis of Bearing Defect
This example teaches how to use frequency analysis to inspect a bearing condition.
Bearing failure is a common cause of machine failure, and the condition of bearings is monitored to predict and plan for replacements.
Bearing defect frequencies are provided by manufacturers and are often available on their websites. An SKF NU 306 ECJ bearing is used in this example. Fault frequencies are found on the manufacturer's website, [1]. So, for a rotation speed of 600 RPM, an outer ring defect results in a frequency of 4.719 x 600 RPM = 47.2 Hz.
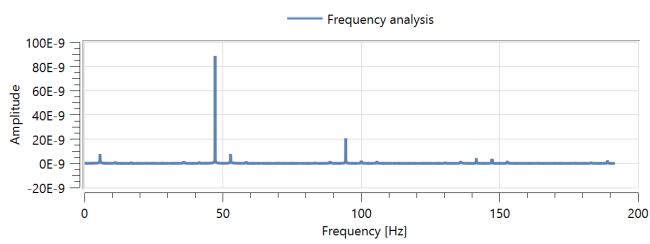
Figure 1: FFT of shaft vibrations.
The frequency characteristics of vibrations on the system can be observed using the FFT tool. When the motion of the shaft (dispSensor.frame_b.r0[2]) is analyzed, it gives 47.2 Hz and some multiple of that frequency. The peaks are very clearly seen in Figure 1.
More about the bearing frequency analysis can be found in this blog post.
References
[1] SKF. "SKF Bearing Frequencies." https://www.skfbearingselect.com/#/size-lubrication/single-bearing
Parameters (4)
| m |
Value: 0.005 Type: Length (m) Description: Gear module |
|---|---|
| z1 |
Value: 40 Type: Integer Description: Number of teeth in wheel one |
| x1 |
Value: 0 Type: Real Description: Profile shift for gear wheel one |
| InitialRotationWheel1 |
Value: 90 - 360 / z1 * floor(90 / 360 * z1) Type: Angle_deg (°) Description: Gear wheel initial angle of rotation shaft 1 |
Components (10)
| world |
Type: World Description: World coordinate system + gravity field + default animation definition |
|
|---|---|---|
| shaftRight |
Type: CylindricalBeam Description: Class with a flexible cylindrical beam |
|
| shaftLeft |
Type: CylindricalBeam Description: Class with a flexible cylindrical beam |
|
| powerSource |
Type: Motor Description: Class for applying a torque to generate a desired angular velocity |
|
| bearingLeft |
Type: SKF_NU_306_ECP Description: Roller bearing parameterized with values corresponding to SKF NU_306_ECP |
|
| bearingRight |
Type: SKF_NU_306_ECP Description: Roller bearing parameterized with values corresponding to SKF NU_306_ECP |
|
| gear |
Type: SpurGear Description: Spur gear with mass, rotations and visualization |
|
| dispSensor |
Type: AbsoluteSensor Description: Measure absolute kinematic quantities of frame connector |
|
| pinned |
Type: PinnedDriveEnd Description: Component that can act as a pinned drive end to a beam, containing different options |
|
| pinnedAxialfree |
Type: PinnedNonDriveEnd Description: Component that can act as a pinned non-drive end to a beam, containing different options |