

WienerFilter
WienerFilter[data,r]
removes noise from data by applying a range-r Wiener filter.
WienerFilter[data,r,ns]
assumes an additive noise power value ns.
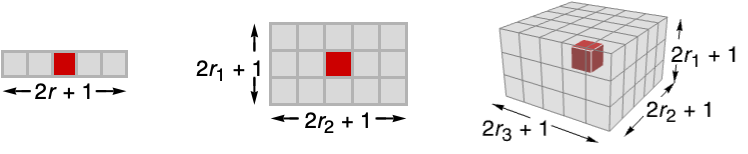
WienerFilter[data,{r1,r2,…},…]
uses radius ri at level i in data.
Details and Options
- The data can be any of the following:
-
list arbitrary-rank numerical array tseries temporal data such as TimeSeries, TemporalData, … image arbitrary Image or Image3D object audio an Audio or Sound object video a Video object - For multichannel images and audio signals, WienerFilter operates separately on each channel.
- WienerFilter[data,{r1,r2,…},…] applies a Wiener filter using a
 convolution kernel.
convolution kernel. - WienerFilter assumes the index coordinate system for lists and images.
- WienerFilter takes a Padding option. The default setting is Padding->"Fixed".
- With setting Padding->None, WienerFilter[data,…] normally returns a result smaller than data.
Examples
open all close allBasic Examples (3)
WienerFilter[{1, 2, 3, 2, 1}, 1]Filter a TimeSeries:
ts = TemporalData[TimeSeries, {{{0., -0.054108337548928784, 0.1280211704499059, 0.28162021808461324,
-0.2057320325139802, -0.4871901025739722, -0.7154387408784426, -0.7399660905024047,
-0.6981022018441507, -0.7178077145466483, -0.8034462541874 ... 7894984276149, 1.8851123992920942, 1.8341759268762767, 2.0335844117979263}},
{{0., 10., 0.1}}, 1, {"Continuous", 1}, {"Continuous", 1}, 1,
{ValueDimensions -> 1, ResamplingMethod -> {"Interpolation", InterpolationOrder -> 1}}}, False,
10.];filtered = WienerFilter[ts, 3]ListLinePlot[{ts, filtered}, PlotLegends -> {"original data", "filtered"}]WienerFilter[[image], 3]Scope (10)
Data (5)
Wiener filtering of signal with additive noise:
data = Table[ Sin[(π/32)n], {n, 0, 127}];
noisy = data + 0.1 * RandomReal[NormalDistribution[], Length[data]];
filtered = WienerFilter[noisy, 6];
ListLinePlot[{noisy, filtered}]a1 = \!\(\*AudioBox[""]\);
a2 = WienerFilter[a1, 20]AudioPlot[{a1, a2}]Apply WienerFilter to a grayscale image:
WienerFilter[[image], 1]Wiener filtering of a 3D image:
WienerFilter[[image], 5]WienerFilter[Video["ExampleData/fish.mp4"], 5]Parameters (5)
Specify one radius to be used in all directions:
WienerFilter[[image], 5]Increasing the radius will result in smoother results:
Table[Labeled[WienerFilter[[image], r], Text["*r* = " <> ToString@r]], {r, {2, 5, 10}}]Wiener filtering just in the first direction:
WienerFilter[[image], {10, 0}]WienerFilter[[image], {0, 10}]Wiener filtering of a 3D image in the vertical direction only:
WienerFilter[[image], {4, 0, 0}]Filtering of the horizontal planes only:
WienerFilter[[image], {0, 4, 4}]Use different estimates of noise power:
WienerFilter[[image], 1, .1 ^ #]& /@ {1, 2}Generalizations & Extensions (1)
WienerFilter works with numerical sparse arrays:
WienerFilter[SparseArray[1 -> 3, 3], 1]Options (3)
Padding (3)
Smoothing with WienerFilter using different padding methods:
v = Table[SawtoothWave[(n/50)], {n, 0, 49}];
pad = {"Fixed", "Periodic", "Reflected"};
ListLinePlot[WienerFilter[v, 15, Padding -> #]& /@ pad, PlotLegends -> pad]By default, a "Fixed" padding is used:
WienerFilter[[image], 20]WienerFilter[[image], 20, Padding -> GrayLevel[.1, .1]]Applications (4)
WienerFilter[[image], 2]Denoise an ultrasound image using WienerFilter:
MeanFilter[[image], 2]Remove Gaussian color noise from an image:
i = [image];
WienerFilter[i, 1]Unsharp masking using Wiener filtering:
i = [image];
2i - WienerFilter[i, 15]Text
Wolfram Research (2010), WienerFilter, Wolfram Language function, https://reference.wolfram.com/language/ref/WienerFilter.html (updated 2025).
CMS
Wolfram Language. 2010. "WienerFilter." Wolfram Language & System Documentation Center. Wolfram Research. Last Modified 2025. https://reference.wolfram.com/language/ref/WienerFilter.html.
APA
Wolfram Language. (2010). WienerFilter. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/WienerFilter.html