WOLFRAM SYSTEM MODELER
BasePendulumModelPartial inverted pendelum model |
|
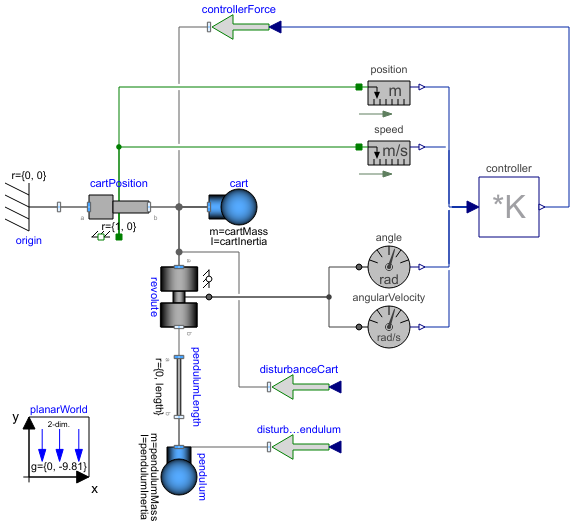
Diagram
Wolfram Language
In[1]:=

SystemModel["EducationExamples.MechanicalEngineering.InvertedPendulum.Components.BasePendulumModel"]
Out[1]:=
Information
This model is a partial model containing the dynamics of the inverted pendelum.
Parameters (5)
| cartMass |
Value: 1 Type: Mass (kg) Description: Mass of the cart (base of the pendulum) |
|---|---|
| cartInertia |
Value: 0.1 Type: Inertia (kg⋅m²) Description: Inertia of the cart (base of the pendulum) |
| pendulumMass |
Value: 0.5 Type: Mass (kg) Description: Mass at the top of the pendulum |
| pendulumInertia |
Value: 0.1 Type: Inertia (kg⋅m²) Description: Inertia at the top of the pendulum |
| angle0 |
Value: 0 Type: Angle (rad) Description: Initial angle of the pendulum |
Connectors (5)
| s |
Type: RealOutput Description: Absolute position of flange as output signal (position.s) |
|
|---|---|---|
| v |
Type: RealOutput Description: Absolute velocity of flange as output signal (speed.v) |
|
| phi |
Type: RealOutput Description: Absolute angle of flange as output signal (angle.phi) |
|
| w |
Type: RealOutput Description: Absolute angular velocity of flange as output signal (angularVelocity.w) |
|
| y |
Type: RealOutput[controller.nout] Description: Connector of Real output signals (controller.y) |
Components (15)
| pendulum |
Type: Body Description: Pendulum mass. |
|
|---|---|---|
| origin |
Type: Fixed Description: Center point. Reference point for cart. |
|
| cart |
Type: Body Description: Mass of cart. |
|
| planarWorld |
Type: PlanarWorld Description: Planar world coordinate system + gravity field + default animation definition |
|
| revolute |
Type: Revolute Description: Pendulum axis of rotation. |
|
| cartPosition |
Type: Prismatic Description: Translational position of cart. |
|
| angle |
Type: AngleSensor Description: Angle sensor for the pendulum. |
|
| controller |
Type: MatrixGain Description: LQ-regulator with optimal gains. |
|
| position |
Type: PositionSensor Description: Position sensor for the cart. |
|
| angularVelocity |
Type: SpeedSensor Description: Velocity sensor for the pendulum. |
|
| speed |
Type: SpeedSensor Description: Velocity sensor for the cart. |
|
| disturbancePendulum |
Type: WorldForce Description: Disturbance force applied on the pendulum. |
|
| disturbanceCart |
Type: WorldForce Description: Disturbance force applied on the cart. |
|
| pendulumLength |
Type: FixedTranslation Description: Length of the pendulum. |
|
| controllerForce |
Type: WorldForce Description: Corrective force applied to the cart. |
Extended by (2)
|
EducationExamples.MechanicalEngineering.InvertedPendulum A LQR-controlled inverted pendulum system, controlled by external hardware using the ModelPlug library |
|
|
EducationExamples.MechanicalEngineering.InvertedPendulum A LQR-controlled inverted pendulum system |