EmptySpaceF[pdata,r]
estimates the empty space function ![]() for point data pdata at radius r.
for point data pdata at radius r.
EmptySpaceF[pproc,r]
computes ![]() for point process pproc.
for point process pproc.
EmptySpaceF[bdata,r]
computes ![]() for binned data bdata.
for binned data bdata.
EmptySpaceF[pspec]
generates the function ![]() that can be applied repeatedly to different radii r.
that can be applied repeatedly to different radii r.


EmptySpaceF
EmptySpaceF[pdata,r]
estimates the empty space function ![]() for point data pdata at radius r.
for point data pdata at radius r.
EmptySpaceF[pproc,r]
computes ![]() for point process pproc.
for point process pproc.
EmptySpaceF[bdata,r]
computes ![]() for binned data bdata.
for binned data bdata.
EmptySpaceF[pspec]
generates the function ![]() that can be applied repeatedly to different radii r.
that can be applied repeatedly to different radii r.
Details and Options
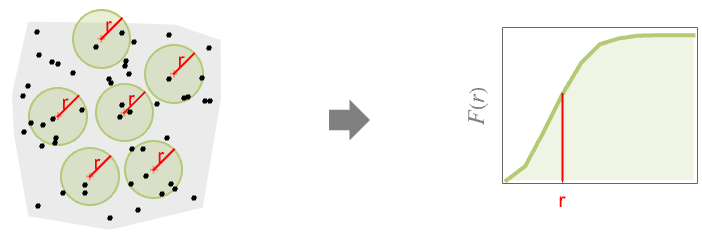
- EmptySpaceF is also known as spherical contact distribution function.
- The function
 gives the probability of finding a point within distance
gives the probability of finding a point within distance  of an arbitrary location which is typically not a point of pdata.
of an arbitrary location which is typically not a point of pdata. -
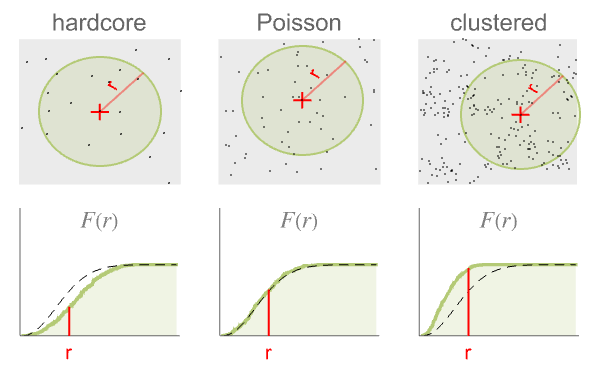
- When comparing with a Poisson point process, the results are:
-
- The radius r can be a single value or a list of values. With no radius r specified, EmptySpaceF returns a PointStatisticFunction that can be used to evaluate the
 function repeatedly.
function repeatedly. - The point data pdata can have the following forms:
-
{p1,p2,…} points pi GeoPosition[…],GeoPositionXYZ[…],… geographic points SpatialPointData[…] spatial point collection {pts,reg} point collection pts and observation region reg - If the observation region reg is not given, a region is automatically computed using RipleyRassonRegion.
- The point process pproc can have the following forms:
-
proc a point process proc {proc,reg} a point process proc and observation region reg - The observation region reg should be parameter free and SpatialObservationRegionQ.
- The binned data bdata is from SpatialBinnedPointData and is treated as an InhomogeneousPoissonPointProcess with a piecewise constant intensify function.
- For pdata,
 is computed by discretizing the observation region and assumes constant point intensity.
is computed by discretizing the observation region and assumes constant point intensity. - For pproc,
 is computed by using exact formulas or by simulation to generate point data.
is computed by using exact formulas or by simulation to generate point data. - The following options can be given:
-
Method Automatic what methods to use SpatialBoundaryCorrection Automatic what boundary correction to use - The following settings can be used for SpatialBoundaryCorrection:
-
Automatic automatically determined boundary correction None no boundary correction "BorderMargin" use interior margin for observation region "Hanisch" drops points for which the distance to the nearest neighbor is greater than the distance to boundary "KaplanMeier" SurvivalDistribution method: the point distance to its nearest neighbor is censored by its distance to the region boundary "NelsonAalen" SurvivalDistribution method: the point distance to its nearest neighbor is censored by its distance to the region boundary - The setting Method->{"Discretization"->opts} allows for adjusting the discretization method in the estimation. Here opts can be any valid options for DiscretizeRegion.
Examples
open all close allBasic Examples (3)
Estimate the empty space function at a given distance:
region = Ball[{0, 0}];
pts = RandomPoint[region, 100];EmptySpaceF[{pts, region}, 0.1]Estimate the empty space function within a range of distances:
spd = SpatialPointData[RandomReal[1, {100, 2}]]rspec = Range[0.01, 0.2, 0.01];est = EmptySpaceF[spd, rspec];Visualize the result with ListPlot:
ListPlot[est, DataRange -> MinMax[rspec], Filling -> Axis, AxesLabel -> {r}]Empty space function of a cluster point process:
f = EmptySpaceF[ThomasPointProcess[3, 2, 0.2, 2], r];Plot[f, {r, 0, 0.5}, AxesLabel -> Automatic]Scope (7)
Point Data (4)
Estimate the empty space function for some data at distance 0.1:
region = Rectangle[{0, 0}, {1, 2}];
pts = RandomPoint[region, 100];EmptySpaceF[{pts, region}, 0.1]Obtain empirical estimates of the empty space function for a list of given distances:
EmptySpaceF[{pts, region}, {0.1, 0.15, 0.01, 0.03}]Create a PointStatisticFunction for future use:
reg = Disk[];
pts = RandomPoint[Disk[], 100];psf = EmptySpaceF[{pts, reg}]Compute a value at a given radius:
psf[0.1]Estimate the empty space function without explicitly providing the observation region:
BlockRandom[SeedRandom[1];
pts = RandomReal[1, {100, 2}]
];psf = EmptySpaceF[pts]Observation region generated by Ripley–Rasson estimator:
psf["ObservationRegion"]Estimated ![]() function at distance 0.05:
function at distance 0.05:
psf[0.05]Use EmptySpaceF with GeoPosition:
pts = RandomGeoPosition[GeoDisk[GeoPosition[{0, 0}], Quantity[10, "Kilometers"]], 10 ^ 2]psf = EmptySpaceF[pts]Plot the point statistics function:
ListPlot[Table[{x, psf[x]}, {x, Quantity[0, "km"], psf["MaxRadius"], Quantity[.1, "km"]}], AxesLabel -> {"km"}]Point Processes (3)
The empty space function for PoissonPointProcess has closed form:
proc = PoissonPointProcess[μ, d];EmptySpaceF[proc, r]Visualize for fixed intensity and varying dimension:
Plot[Table[EmptySpaceF[proc /. μ -> 2, r], {d, 1, 4}]//Evaluate, {r, 0, 1.3}, AxesLabel -> {r}, PlotLegends -> (Row[{#, "D"}]& /@ Range[4])]The empty space function for a cluster process ThomasPointProcess with specified dimension:
proc2D = ThomasPointProcess[30, 10, .3, 2];DiscretePlot[EmptySpaceF[proc2D, r], {r, 0.01, .5, .02}, PlotRange -> {0, 1}, AxesLabel -> Automatic]proc3D = ThomasPointProcess[30, 10, .3, 3];DiscretePlot[EmptySpaceF[proc3D, r], {r, 0.01, .5, .02}, PlotRange -> {0, 1}, AxesLabel -> Automatic]The empty space function for a cluster process MaternPointProcess with specified dimension:
proc2D = MaternPointProcess[30, 5, 1, 2];DiscretePlot[EmptySpaceF[proc2D, r], {r, 0.01, .5, .02}, PlotRange -> {0, 1}, AxesLabel -> Automatic]proc3D = MaternPointProcess[30, 5, 1, 3];DiscretePlot[EmptySpaceF[proc3D, r], {r, 0.01, .5, .02}, PlotRange -> {0, 1}, AxesLabel -> Automatic]Options (3)
SpatialBoundaryCorrection (2)
The EmptySpaceF estimator without boundary correction is biased and should not be used unless with a large point set:
region = Rectangle[{0, 0}, {1, 2}];
pts = RandomPoint[region, 100];EmptySpaceF[{pts, region}, 0.1, SpatialBoundaryCorrection -> "None"]The default method "BorderMargin" only considers the points that are distance ![]() from the boundary:
from the boundary:
EmptySpaceF[{pts, region}, 0.1, SpatialBoundaryCorrection -> "BorderMargin"]"Hanisch" method weights each point in the observation region to make the estimated values unbiased:
EmptySpaceF[{pts, region}, 0.1, SpatialBoundaryCorrection -> "Hanisch"]"KaplanMeier" and "NelsonAalen" methods are estimators used in SurvivalDistribution. The distance of each point to its nearest neighbor point is censored by the distance of each point to the boundary of the observation region:
EmptySpaceF[{pts, region}, 0.1, SpatialBoundaryCorrection -> "KaplanMeier"]EmptySpaceF[{pts, region}, 0.1, SpatialBoundaryCorrection -> "NelsonAalen"]Compare the different edge correction methods:
region = Disk[];
pts = RandomPoint[region, 400];Estimate the values of the empty space function with three different methods:
rlist = Range[0.01, 0.1, 0.005];
mths = {"BorderMargin", "Hanisch", "KaplanMeier"};data = EmptySpaceF[{pts, region}, rlist, SpatialBoundaryCorrection -> #]& /@ mths;f[r_] := 1 - Exp[-(400 / RegionMeasure[region])(Pi)r ^ 2]Show[Plot[f[r], {r, 0, 0.1}, PlotStyle -> Gray, PlotLegends -> {"theoretical"}], ListPlot[data, DataRange -> MinMax[rlist], PlotLegends -> mths], AxesLabel -> {r}]Method (1)
Discretization setting can be provided under Method as suboptions:
region = Triangle[{{0, 0}, {1, 2}, {-3, 1}}];
pts = RandomPoint[region, 100];Estimate the empty space function at the same radius with different values of MaxCellMeasure:
EmptySpaceF[{pts, region}, 0.05, Method -> {"Discretization" -> {MaxCellMeasure -> #}}]& /@ {0.005, 0.01, 0.02}Use different discretization methods to estimate the empty space function at the same radius:
EmptySpaceF[{pts, region}, 0.05, Method -> {"Discretization" -> {Method -> #}}]& /@ {"Continuation", "DiscretizeGraphics"}Applications (3)
The empty space function for spatially random data:
data1 = RandomPointConfiguration[PoissonPointProcess[20, 2], Disk[]];
data2 = RandomPointConfiguration[InhomogeneousPoissonPointProcess[Function[{x, y}, (20x ^ 2 + 40y ^ 2)], 2], Disk[]];F1 = EmptySpaceF[data1];
F2 = EmptySpaceF[data2];Plot[{F1[r], F2[r]}, {r, 0, 1}, PlotRange -> All, AxesLabel -> {r}]The empty space function for hardcore data:
rr = {0.05, 0.1, 0.15};
spds = Table[RandomPointConfiguration[HardcorePointProcess[100, rad, 2], Disk[]], {rad, rr}];Estimate the values of the empty space function with given data:
Fs = Table[EmptySpaceF[spd], {spd, spds}];DiscretePlot[Map[#[r]&, Fs]//Evaluate, {r, 0.005, 0.2, 0.005}, AxesLabel -> {r}, PlotLegends -> (Row[{"rad = ", #}]& /@ rr)]On Monday, May 20, 2019, the Severe Prediction Center highlighted a small corridor from the northeastern part of the Texas Panhandle to central Oklahoma in a 45 percent probability of EF2–EF5 tornadoes to occur within 25 miles of a given location, which defines a value of EmptySpaceF:
eqn[proc_] := (EmptySpaceF[proc, Quantity[25, "Miles"]] == .45)Assuming uniform intensity over the region, use the Poisson point process as a tornado pattern model:
eqn[PoissonPointProcess[λ, 2]]sol = First@Solve[eqn[PoissonPointProcess[λ, 2]], λ]Define the Poisson point process:
model = PoissonPointProcess[λ /. sol, 2]Compute probabilities of a tornado within a given radius of a location:
Plot[EmptySpaceF[model, Quantity[r, "Miles"]], {r, 0, 50}, AxesLabel -> {"Miles"}]Simulate a possible tornado spread over the state of Oklahoma:
OK = RandomPointConfiguration[model, Entity["AdministrativeDivision", {"Oklahoma", "UnitedStates"}]["Polygon"]]GeoListPlot[OK["Points"], GeoRange -> Entity["AdministrativeDivision", {"Oklahoma", "UnitedStates"}]]Properties & Relations (4)
The empty space function behaves like a CDF:
data = RandomPointConfiguration[PoissonPointProcess[20, 2], Disk[]];F = EmptySpaceF[data]Plot[F[r], {r, 0, 1}, PlotRange -> All]The empty space function for a PoissonPointProcess is equivalent to SurvivalFunction at 0 of PointCountDistribution on a disk of radius ![]() :
:
proc[d_] := PoissonPointProcess[μ, d]EmptySpaceF[proc[d], r]Define the point count distribution for the process on a ball of radius ![]() :
:
dist[d_] := PointCountDistribution[proc[d], Ball[ConstantArray[0, d], r]];Compare its survival function at 0 with the empty space function for fixed dimensions:
SurvivalFunction[dist[2], 0] === EmptySpaceF[proc[2], r]SurvivalFunction[dist[3], 0] === EmptySpaceF[proc[3], r]With[{d = RandomInteger[10 ^ 6]}, SurvivalFunction[dist[d], 0] === EmptySpaceF[proc[d], r]]The empty space and the nearest neighbor functions of a PoissonPointProcess are identical:
proc = PoissonPointProcess[μ, d];EmptySpaceF[proc, r]NearestNeighborG[proc, r]%% - %In 1D they are both equivalent to the CDF of an ExponentialDistribution:
vol[d_] := π ^ (d / 2) / Gamma[1 + d / 2]CDF[ExponentialDistribution[μ * vol[1]], r]Block[{d = 1}, % == EmptySpaceF[proc, r] == NearestNeighborG[proc, r]//Simplify[#, r ≥ 0]&]EmptySpaceF is often compared with NearestNeighborG, which estimates the probability of finding another point within distance r from a point in the point collection:
region = Ball[{0, 0}];
pts = RandomPoint[region, 1000];rspec = Range[0, 0.08, 0.005];
res = NearestNeighborG[{pts, region}, rspec];Visualize the result with ListPlot:
ListPlot[res, DataRange -> MinMax[rspec], Filling -> Axis, AxesLabel -> {r}]Compare the estimates between EmptySpaceF and NearestNeighborG for point data generated by HardcorePointProcess:
spd1 = RandomPointConfiguration[HardcorePointProcess[500, 0.15, 2], region]rspec1 = Range[0, 0.3, 0.01];
esf = EmptySpaceF[spd1, rspec1];
nng = NearestNeighborG[spd1, rspec1];ListLinePlot[{nng, esf}, DataRange -> MinMax[rspec1], Filling -> Axis, AxesLabel -> {r}, PlotLegends -> {"Nearest Neighbor Distribution", "Empty Space Distribution"}]Text
Wolfram Research (2020), EmptySpaceF, Wolfram Language function, https://reference.wolfram.com/language/ref/EmptySpaceF.html.
CMS
Wolfram Language. 2020. "EmptySpaceF." Wolfram Language & System Documentation Center. Wolfram Research. https://reference.wolfram.com/language/ref/EmptySpaceF.html.
APA
Wolfram Language. (2020). EmptySpaceF. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/EmptySpaceF.html