



DSolveValue
DSolveValue[eqn,expr,x]
gives the value of expr determined by a symbolic solution to the ordinary differential equation eqn with independent variable x.
DSolveValue[eqn,expr,{x,xmin,xmax}]
uses a symbolic solution for x between xmin and xmax.
DSolveValue[{eqn1,eqn2,…},expr,…]
uses a symbolic solution for a list of differential equations.
DSolveValue[eqn,expr,{x1,x2,…}]
uses a solution for the partial differential equation eqn.
DSolveValue[eqn,expr,{x1,x2,…}∈Ω]
uses a solution of the partial differential equation eqn over the region Ω.
Details and Options
- DSolveValue can solve ordinary differential equations (ODEs), partial differential equations (PDEs), differential algebraic equations (DAEs), delay differential equations (DDEs), integral equations, integro-differential equations and hybrid differential equations.
- The output from DSolveValue is controlled by the form of the dependent function, u or u[x]:
-
DSolveValue[eqn,u,x] f where f is a pure function DSolveValue[eqn,u[x],x] f[x] where f[x] is an expression in x - DSolveValue will return a single solution, whereas DSolve can return multiple solutions.
- DSolveValue can give solutions that include Inactive sums and integrals that cannot be carried out explicitly. Variables K[1], K[2], … are used in such cases.
- DSolveValue[eqn,y[Infinity],x] gives the limiting value of the solution y at Infinity.
- Different classes of equations solvable by DSolveValue include:
-
u'[x]f[x,u[x]] ordinary differential equation a ∂xu[x,y]+b ∂yu[x,y]f partial differential equation f[u'[x],u[x],x]0 differential algebraic equation u'[x]f[x,u[x-x1]] delay differential equation u'[x]+  k[x,t]u[t]tf
k[x,t]u[t]tfintegro-differential equation {…,WhenEvent[cond,u[x]g]} hybrid differential equation - DSolveValue[u[t]->sys,resp,t] can be used for solving system models, where sys can be a TransferFunctionModel or a StateSpaceModel and the response resp can be one of the following: »
-
"StateResponse" state response of sys to the input 
"OutputResponse" output response of sys to the input 
- DSolveValue[sys,resp,t] can be used for solving system models, where sys can be a TransferFunctionModel or a StateSpaceModel and the response resp can be one of the following:
-
"ImpulseResponse" output response of sys for the input DiracDelta[t] "StepResponse" output response of sys for the input UnitStep[t] "RampRespone" output response of sys for the input Ramp[t] - Boundary conditions for ODEs and DAEs can be specified by giving equations at specific points such as u[x1]a, u'[x2]b, etc.
- Boundary conditions for PDEs can be given as equations u[x,y1]a, Derivative[1,0][u][x,y1]b, etc. or as DirichletCondition[u[x,y]g[x,y],cond].
- Initial conditions for DDEs can be given as a history function g[x] in the form u[x/;x<x0]g[x].
- WhenEvent[event,action] may be included in the equations eqn to specify an action that occurs when event becomes True.
- The specification u∈Vectors[n] or u∈Matrices[{m,n}] can be used to indicate that the dependent variable u is a vector-valued or a matrix-valued variable, respectively. Alternatively, u can be specified as a VectorSymbol or MatrixSymbol. » »
- The region Ω can be anything for which RegionQ[Ω] is True.
- N[DSolveValue[...]] calls NDSolveValue or ParametricNDSolveValue for differential equations that cannot be solved symbolically.
- The following options can be given:
-
Assumptions $Assumptions assumptions on parameters DiscreteVariables {} discrete variables for hybrid equations GeneratedParameters C how to name generated parameters Method Automatic what method to use - GeneratedParameters control the form of generated parameters; for ODEs and DAEs these are by default constants C[n] and for PDEs they are arbitrary functions C[n][…]. »
Examples
open all close allBasic Examples (3)
Solve a differential equation:
DSolveValue[y'[x] + y[x] == a Sin[x], y[x], x]DSolveValue[{y'[x] + y[x] == a Sin[x], y[0] == 0}, y[x], x]Get a "pure function" solution for ![]() :
:
sol = DSolveValue[{y'[x] + y[x] == a Sin[x], y[0] == 0}, y, x]Plot[Table[sol[x] /. {a -> i}, {i, 7}], {x, -2, 10}]Obtain the value of the solution at a point:
DSolveValue[{y''[x] + y[x] == 0, y[0] == 0, y'[0] == 1}, y[3], x]DSolveValue[{y''[x] + y[x] == 0, y[0] == 0, y'[0] == 1}, y'[x], x]Scope (121)
Basic Uses (13)
Compute the general solution of a first-order differential equation:
DSolveValue[y'[x] == 3y[x], y[x], x]Obtain a particular solution by adding an initial condition:
DSolveValue[{y'[x] == 3y[x], y[0] == 5}, y[x], x]Plot the general solution of a differential equation:
sol = DSolveValue[{y'[x] == -y[x]}, y[x], x]Plot the solution curves for two different values of the arbitrary constant C[1]:
Plot[{sol /. C[1] -> 2, sol /. C[1] -> 3}, {x, 1, 4}]Plot the solution of a boundary value problem:
sol = DSolveValue[{y'[x] == -3y[x] ^ 2, y[1] == 2}, y[x], x]Plot[sol, {x, 1, 4}]Verify the solution of a first-order differential equation by using y in the second argument:
eqns = {y'[x] == y[x] + a Cos[x], y[0] == 3};sol = DSolveValue[eqns, y, x]eqns /. {y -> sol}//SimplifyObtain the general solution of a higher-order differential equation:
DSolveValue[{y''[x] + 4y[x] == 7}, y[x], x]DSolveValue[{y''[x] + 4y[x] == 7, y[0] == 1, y'[0] == 2}, y[x], x]Solve a system of differential equations:
eqns = {Derivative[1][y][x] == y[x] - a z[x], Derivative[1][z][x] == y[x] - z[x], y[0] == 1, z[0] == 4};sol = DSolveValue[eqns, {y, z}, x]ParametricPlot[Evaluate[Table[{sol[[1]][x], sol[[2]][x]}, {a, 3, 8}]], {x, 0, 10}]eqns /. Thread[{y, z} -> sol]//SimplifySolve a system of differential-algebraic equations:
sol = DSolveValue[{y'[x] - 3z[x] == Sin[x], y[x] + z[x] == 1 / 5, y[Pi / 2] == 1 / 2}, {y, z}, x]Plot[Evaluate[{sol[[1]][x], sol[[2]][x], sol[[1]][x] + sol[[2]][x]}], {x, 2, 16}, PlotLegends -> {y[x], z[x], y[x] + z[x]}]Solve a partial differential equation:
z := u[x, y]p := D[u[x, y], x]q := D[u[x, y], y]eqn = p + 3q + z == 1;sol = DSolveValue[eqn, u, {x, y}]sol /. C[1] -> SinPlot3D[%[x, y], {x, -3, 3}, {y, -3, 3}, PlotRange -> All]Use different names for the arbitrary constants in the general solution:
DSolveValue[y''[x] - 4y[x] == 0, y[x], x]DSolveValue[y''[x] - 4y[x] == 0, y[x], x, GeneratedParameters -> f]Solve a delay differential equation:
DSolveValue[{x'[t] == x[t - 1] ^ 2, x[t /; t ≤ 0] == a t}, x[t], {t, 0, 2}]Plot the solution for different values of the parameter:
Plot[Evaluate[Table[%, {a, 1, 5}]], {t, -1, 2}]Solve a hybrid differential equation:
DSolveValue[{y''[t] == -981 / 100, y[0] == 5, y'[0] == 0, WhenEvent[y[t] == 0, y'[t] -> -(7 / 10)y'[t]]}, y[t], {t, 0, 4}]This system models a bouncing ball:
Plot[%, {t, 0, 4}]Apply N[DSolveValue[…]] to invoke NDSolveValue if symbolic solution fails:
DSolveValue[{y''[x] + x ^ 2y'[x] + Sin[y[x]] == 1, y[0] == 1, y'[0] == 1}, y, {x, 0, 4}]f = N[%]Plot[f[x], {x, 0, 4}]Find the general solution of an ODE with quantities:
DSolveValue[Derivative[2][x][t] == Quantity[5, ("Meters"/"Seconds"^2)], x[t], t]Solve an initial-value problem:
DSolveValue[{Derivative[2][x][t] == Quantity[5, ("Meters"/"Seconds"^2)], x[Quantity[0, "Seconds"]] == Quantity[3, "Meters"], Derivative[1][x][Quantity[0, "Seconds"]] == Quantity[7, ("Meters"/"Seconds")]}, x[t], t]Linear Differential Equations (5)
DSolveValue[{y'[x] == ay[x], y[0] == 1}, y[x], x]Inhomogeneous first-order equation:
DSolveValue[y'[x] + x y[x] == Cos[x], y[x], x]Solve a boundary value problem:
sol = DSolveValue[{y''[x] - x y[x] == 0, y[0] == 1, y[9] == 1}, y[x], x]Plot[sol, {x, -10, 10}]Second-order equation with constant coefficients:
DSolveValue[y''[x] + 4y'[x] + 5y[x] == 0, y[x], x]DSolveValue[x ^ 2y''[x] + 4x y'[x] + 7y[x] == 0, y[x], x]Second-order equation with variable coefficients, solved in terms of elementary functions:
DSolveValue[x y''[x] + 2y'[x] - x y[x] == Sin[x], y, x]DSolveValue[y''[x] - x y[x] == 0, y[x], x]DSolveValue[(1 - x ^ 2)y''[x] - 2x y'[x] + (49 - 49x ^ 2 - 16 / (1 - x ^ 2) + SpheroidalEigenvalue[5, 4, 7])y[x] ==
0, y[x], x]Equations with nonrational coefficients:
DSolveValue[y''[x] + (8 + 3Cos[x] ^ 2)y[x] == 0, y[x], x]DSolveValue[y''[x] + (9 + Sech[x] ^ 2)y[x] == 0, y[x], x]DSolveValue[y''[x] == Exp[-x]y[x], y[x], x]DSolveValue[y'''[x] + 4y'[x] == 5y[x], y, x]Solution in terms of hypergeometric functions:
DSolveValue[3x ^ 3y''''[x] + 19x ^ 2y'''[x] + (2x - 3x ^ 2)y''[x] + (2 - 9x)y'[x] - 3y[x] == 0, y[x], x]Fourth-order equation solved in terms of Kelvin functions:
DSolveValue[(525 + x ^ 4)y[x] - 51(-x y'[x] + x ^ 2 y''[x]) + 2x ^ 3y'''[x] + x ^ 4 y''''[x] == 0, y[x], x]Higher-order inhomogeneous equation with constant coefficients:
DSolveValue[Derivative[4][y][x] + 5y'''[x] + 2y[x] == x E^3x Cos[3x], y[x], x]Nonlinear Differential Equations (4)
DSolveValue[y'[x] - Sqrt[(y[x] / x)] == y[x] / x, y, x]Solution in terms of WeierstrassP:
DSolveValue[y''[x] == y[x] ^ 2 + 1, y, x]Solve a boundary value problem:
DSolveValue[{y''[x] == y[x] ^ 3, y[0] == 5, y'[0] == 25 / Sqrt[2]}, y[x], x]Solve a nonlinear first-order ODE:
DSolveValue[2 x Sqrt[(1 - x/1 + x)] (1 + x) ArcSech[x]^2 - E^E^(f[x]/ArcSech[x]) + (f[x]/ArcSech[x]) f[x] - E^E^(f[x]/ArcSech[x]) + (f[x]/ArcSech[x]) x Sqrt[(1 - x/1 + x)] (1 + x) ArcSech[x] Derivative[1][f][x] == 0, f[x], x]Systems of Differential Equations (10)
DSolveValue[{y'[x] == x ^ 2y[x], z'[x] == 5z[x]}, {y[x], z[x]}, x]Inhomogeneous linear system with constant coefficients:
sol[x_] = With[{θ = Pi / 3}, DSolveValue[{y'[x] == Cos[θ]y[x] - Sin[θ]z[x] + 1, z'[x] == Sin[θ]y[x] + Cos[θ]z[x], y[0] == 1, z[0] == 1}, {y[x], z[x]}, x]]Plot[sol[x], {x, 0, 9}]Linear system with rational function coefficients:
DSolveValue[{Derivative[1][y][x] == -(4 y[x]/x) + (4 z[x]/x), Derivative[1][z][x] == ((4/x) - (x/4)) y[x] - (4 z[x]/x)}, {y[x], z[x]}, x]DSolveValue[ {y'[x] == Exp[z[x]] + 1, z'[x] == y[x] - x}, {y[x], z[x]}, x]//QuietSolve a linear system of ODEs using vector variables:
m = {{4, -6}, {1, -1}};DSolveValue[x'[t] == m.x[t], x[t]∈Vectors[2], t]Alternatively, define ![]() as a VectorSymbol:
as a VectorSymbol:
x = VectorSymbol["x", 2]DSolveValue[x'[t] == m.x[t], x[t], t]Solve a linear system of four ODEs using matrix variables:
m = {{0, 1}, {-1, 0}};
x0 = {{1, 2}, {3, 4}};(sol = DSolveValue[{x'[t] == m.x[t], x[0] == x0}, Element[x[t], Matrices[{2, 2}]], t])//MatrixFormAlternatively, define ![]() as a MatrixSymbol:
as a MatrixSymbol:
x = MatrixSymbol["x", {2, 2}](sol = DSolveValue[{x'[t] == m.x[t], x[0] == x0}, x[t], t])//MatrixFormPlot[Evaluate[Flatten[sol]], {t, 0, 10}]Solve inhomogeneous linear system of ODEs with constant coefficients:
m = {{2, -1}, {1, -2}};g = {(2t - 5)Cos[3t], (3t + 2)Sin[3t]} E^-2t;DSolveValue[x'[t] - m.x[t] == g, Element[x[t], Vectors[2]], t]Solve a coupled system of linear and nonlinear ODEs:
DSolveValue[{Derivative[1][y][x] == -(4 y[x]/x) + (4 z[x]/x), Derivative[1][z][x] == ((4/x) - (x/4)) y[x] - (4 z[x]/x), Derivative[1][y1][x] == 1 + E^z1[x], Derivative[1][z1][x] == -x + y1[x], w1'[x] + 2 E ^ w2[x] == 0, w2'[x] == -w1[x]}, {y[x], z[x], y1[x], z1[x], w1[x], w2[x]}, x]//QuietSolve a Fuchsian system of linear ODEs:
DSolveValue[{Derivative[1][y1][x] == (y2[x]/(-(2/3) + (I/2)) + x), Derivative[1][y2][x] == (y3[x]/10 ((-4 - 6 I) + x)), Derivative[1][y3][x] == 0}, {y1[x], y2[x], y3[x]}, x]Solve a system of linear ODEs with rational function coefficients:
MatrixForm[m = {{0, x^4 / (x - 2)^2, 0}, {0, 0, x / (x^2 + 1)}, {0, 0, 0}}]DSolveValue[Join[Thread[D[{y1[x], y2[x], y3[x]}, x] == m.{y1[x], y2[x], y3[x]}], {y1[0] == 1, y2[0] == 1, y3[0] == 1}], {y1[x], y2[x], y3[x]}, x]Differential-Algebraic Equations (3)
Solve a system of linear differential-algebraic equations:
DSolveValue[{2 y'[x] + z'[x] == 4y[x] + x, y[x] - z[x] == 1}, {y[x], z[x]}, x]Solve a boundary value problem:
{sol1, sol2} = DSolveValue[{y'[x] - 4z[x] == Cos[x], y[x] + z[x] == 1 / 2, y[Pi / 2] == 1 / 2}, {y, z}, x]Plot[{sol1[x], sol2[x], sol1[x] + sol2[x]}, {x, 2, 16}]An index-2 differential-algebraic equation:
DSolveValue[{x'[t] == x[t] + 2y[t], y[t] == x[t] + 2 ^ t, x[t] + z[t] == 0}, {x[t], y[t], z[t]}, t]Delay Differential Equations (2)
Solve a delay differential equation:
sol = DSolveValue[{x'[t] == x[t - 1] ^ 2, x[t /; t ≤ 0] == a t}, x, {t, 0, 2}]Plot the solution for different values of the parameter a:
Plot[Table[sol[t], {a, 1, 5}], {t, -1, 2}]Solve a system of delay differential equations:
eqns = {x'[t] == a y[t - 1] + y[t - 3], y'[t] == x[t - 1], x[t /; t ≤ 0] == t, y[t /; t ≤ 0] == t ^ 2};{sol1, sol2} = DSolveValue[eqns, {x, y}, {t, 0, 5}]Plot the solution for different values of the parameter a:
ParametricPlot[Table[{sol1[t], sol2[t]}, {a, -1, 2, 1 / 3}]//Evaluate, {t, 0, 5}, Exclusions -> None]Piecewise Differential Equations (4)
Using a piecewise forcing function:
sol = DSolveValue[{y''[x] - y[x] == Max[x, x ^ 2], y[0] == 1, y'[0] == 2}, y[x], x]//SimplifyA differential equation with a piecewise coefficient:
DSolveValue[y'[x] + Clip[x] ^ 2y[x] == 0, y[x], x]A nonlinear piecewise-defined differential equation:
sol = DSolveValue[{y'[x] == Piecewise[{{Cos[x] ^ 2, x > 2}}, y[x] ^ 2 / 3], y[0] == 1}, y, x]Plot[sol[x], {x, 0, 7}]Differential equations involving generalized functions:
DSolveValue[y''[x] - y[x] == HeavisideTheta[x], y[x], x]A simple impulse response or Green's function:
DSolveValue[y'[x] + 7y[x] == DiracDelta[x], y[x], x]Solve a piecewise differential equation on different subintervals of the real line:
DSolveValue[y'[x] == UnitStep[x], y[x], {x, 0, 1}]DSolveValue[y'[x] == UnitStep[x], y, {x, -1, 0}]DSolveValue[y'[x] == UnitStep[x], y, {x, -1, 1}]Hybrid Differential Equations (8)
Solve a first-order differential equation with a time-dependent event:
sol = DSolveValue[{x'[t] == x[t], x[0] == 1, WhenEvent[Mod[t, 1] == 0, x[t] -> x[t] + 10]}, x[t], {t, 0, 3}]Plot[sol, {t, 0, 4}, Exclusions -> None]Solve a second-order differential equation with a time-dependent event:
dsol = DSolveValue[{x''[t] == x[t] + t, x[0] == 1, x'[0] == 3, WhenEvent[Mod[2 t, 1] == 0, {x[t] -> x[t] + t, x'[t] -> -x'[t]}]}, x, {t, 0, 4}]Plot[dsol[t], {t, 0, 4}, Exclusions -> None]Solve a system of differential equations with a time-dependent event:
{dsol1, dsol2} = DSolveValue[{x'[t] == y[t], y'[t] == 2x[t], x[0] == 0, y[0] == 1, WhenEvent[Mod[t, 1] == 0, {x[t] -> x[t], y[t] -> -y[t] + 2}]}, {x[t], y[t]}, {t, 0, 4}]ParametricPlot[{dsol1, dsol2}, {t, 0, 4}, PlotRange -> All, Exclusions -> None]Stop the integration when an event occurs:
DSolveValue[{x'[t] == x[t], x[0] == 1, WhenEvent[t == 2, "StopIntegration"]}, x, {t, 0, 3}]Remove an event after it has occurred once:
sol = DSolveValue[{x''[t] + x[t] == 0, x[0] == 0, x'[0] == 1, WhenEvent[x[t] == 0, {x'[t] -> -x'[t], "RemoveEvent"}]}, x, {t, 0, 10}]Plot[sol[t], {t, 0, 10}]Specify that a variable maintains its value between events:
sol = DSolve[{x'[t] == a[t], x[0] == 0, a[0] == 1, WhenEvent[Mod[x[t], 1] == 0, a[t] -> -a[t]]}, {x, a}, {t, 0, 4}, DiscreteVariables -> a]Plot[x[t] /. sol, {t, 0, 4}]Prescribe a different action at each event:
sol = DSolveValue[{x'[t] == y[t], y'[t] == 1, x[0] == 0, y[0] == 0, WhenEvent[t == 1, x[t] -> x[t] + 1], WhenEvent[t == 2, y[t] -> y[t] + 2]}, {x, y}, {t, 0, 3}]ParametricPlot[{sol[[1]][t], sol[[2]][t]}, {t, 0, 3}, Exclusions -> None]Several events with the same action:
sol = DSolveValue[{x'[t] == 1, x[0] == 0, WhenEvent[{t == 1, t == 2}, x[t] -> x[t] + 1]}, x, {t, 0, 3}]Plot[sol[t], {t, 0, 3}, Exclusions -> None]Sturm-Liouville Problems (6)
Solve an eigenvalue problem with Dirichlet conditions:
sol = DSolveValue[{y''[x] + λ y[x] == 0, y[0] == 0, y[π] == 0}, y[x], x]Make a table of the first five eigenfunctions:
eigfuns = Table[sol //. { -> i, λ -> ^2} /. {C[1] -> 1}, {i, 5}]Plot[Evaluate[eigfuns], {x, 0, Pi}]Solve an eigenvalue problem with Neumann conditions:
sol = DSolveValue[{y''[x] + λ y[x] == 0, y'[0] == 0, y'[π] == 0}, y[x], x]Make a table of the first five eigenfunctions:
eigfuns = Table[sol //. { -> i, λ -> ^2} /. {C[1] -> 1}, {i, 5}]Plot[Evaluate[eigfuns], {x, 0, Pi}]Solve an eigenvalue problem with mixed boundary conditions:
sol = DSolveValue[{y''[x] + λ y[x] == 0, y[0] == 0, y'[π] == 0}, y[x], x]Make a table of the first five eigenfunctions:
eigfuns = Table[sol //. { -> i, λ -> (-(1/2) + )^2} /. {C[1] -> 1}, {i, 5}]Plot[Evaluate[eigfuns], {x, 0, Pi}]Solve an eigenvalue problem with a Robin condition at the left end of the interval:
sol = DSolveValue[{y''[x] + λ y[x] == 0, y[0] + y'[0] == 0, y[1] == 0}, y[x], x]Locate the roots of the transcendental eigenvalue equation in the range 10<λ<80:
roots = λ /. Solve[Sqrt[λ] Cos[Sqrt[λ]] == Sin[Sqrt[λ]] && 10 < λ < 80, λ];data = Table[{λ, 0}, {λ, roots}];Plot[Sqrt[λ] Cos[Sqrt[λ]] - Sin[Sqrt[λ]], {λ, 10, 80}, Epilog -> {PointSize[Large], Red, Point[data]}]Obtain the eigenfunctions within this range by using Assumptions:
DSolveValue[{y''[x] + λ y[x] == 0, y[0] + y'[0] == 0, y[1] == 0}, y[x], x, Assumptions -> 1 < λ < 80]Solve an eigenvalue problem with Robin boundary conditions at both ends:
DSolveValue[{y''[x] + 2λ y'[x] + λ ^ 2 y[x] == 0, y[1] + y'[1] == 0, 3y[2] + 2y'[2] == 0}, y[x], x]Solve an eigenvalue problem for the Airy operator:
eqns = {-y''[x] + x y[x] == λ y[x], y[0] == 0, y[1] == 0};sol = DSolveValue[eqns, y[x], x, Assumptions -> 1 < λ < 200];eigvals = {ToRules[sol[[1, 1, 2]]]}Eigenfunctions for this problem are given by:
eigfuns = (sol[[1, 1, 1]] /. {C[1] -> 1})Plot the eigenfunctions for the range 1<λ<200:
Plot[Evaluate[eigfuns /. eigvals], {x, 0, 1}]Integral Equations (6)
Solve a Volterra integral equation:
eqn = y[x] == x^3 + λSubsuperscript[∫, 0, x](t - x)y[t]ⅆt;sol = DSolveValue[eqn, y[x], x]Plot[Table[sol, {λ, 1, 3, 0.5}]//Evaluate, {x, 0, 20}]Solve a Fredholm integral equation:
eqn = y[x] == Sin[7 x] - (x/a) + Subsuperscript[∫, 0, (π/2)]x y[t]ⅆt;sol = DSolveValue[eqn, y[x], x]Plot[Table[sol, {a, -1, 4, 0.7}]//Evaluate, {x, 0, Pi / 2}]Solve an integro-differential equation:
eqn = Derivative[1][y][x] == 1 + Sin[a x] + Subsuperscript[∫, 0, x]y[t]ⅆt;sol1 = DSolveValue[eqn, y[x], x]Specify an initial condition to obtain a particular solution:
init = y[0] == -1;sol2 = DSolveValue[{eqn, init}, y[x], x]Plot[Table[sol2, {a, -1, 4, 0.7}]//Evaluate, {x, 0, 3}]Solve a singular Abel integral equation:
eqn = Sin[a x] == Subsuperscript[∫, 0, x](y[t]/Sqrt[x - t])ⅆt;sol = DSolveValue[eqn, y[x], x]Plot[Table[sol, {a, 1, 3, 0.7}]//Evaluate, {x, 0, 9}]Solve a weakly singular Volterra integral equation:
eqn = y[x] == x^a - Subsuperscript[∫, 0, x](y[t]/Sqrt[x - t])ⅆt;sol = DSolveValue[eqn, y[x], x]Plot[Table[sol, {a, 1, 4, 0.7}]//Evaluate, {x, 0, 2}]Solve a homogeneous Fredholm equation of the second kind:
eqn = y[x] == λ Subsuperscript[∫, 0, π]Cos[x + t]y[t]ⅆt;sol = DSolveValue[eqn, y[x], x]Plot[Table[sol /. {C[1] -> 1, C[2] -> 1}, {λ, {-2 / Pi, 2 / Pi}}]//Evaluate, {x, 0, 3π}]First-Order Partial Differential Equations (7)
General solution for a linear first-order partial differential equation:
DSolveValue[3D[u[x, y], x] + 5D[u[x, y], y] == x , u[x, y], {x, y}]The solution with a particular choice of the arbitrary function C[1]:
% /. {C[1][e_] :> Sin[e] + Cos[e]}Plot3D[%, {x, -5, 5}, {y, -5, 5}]Initial value problem for a linear first-order partial differential equation:
DSolveValue[{x D[u[x, y], y] + y D[u[x, y], x] ==
-4x y u[x, y], u[x, 0] == E ^ (-x ^ 2)}, u[x, y], {x, y}]Plot3D[%, {x, -2, 2}, {y, -2, 2}, ColorFunction -> "TemperatureMap"]Initial-boundary value problem for a linear first-order partial differential equation:
DSolveValue[{D[u[t, x], t] + D[u[t, x], x] == 0, u[t, 0] == 0, u[0, x] == Sin[x]}, u[t, x], {t, x}]Plot3D[%//Evaluate, {t, 0, 3}, {x, 0, 3}, Exclusions -> None]General solution for the transport equation:
DSolveValue[D[u[t, x], t] + c D[u[t, x], x] == 0, u[t, x], {t, x}]DSolveValue[{D[u[t, x], t] + c D[u[t, x], x] == 0, u[0, x] == E ^ (-x ^ 2)}, u[t, x], {t, x}]Plot the traveling wave with speed c1:
Plot[% /. {c -> 1, t -> 3}//Evaluate, {x, 0, 10}, PlotRange -> All, Ticks -> False, Filling -> Axis, Epilog -> Arrow[{{4, 4 / 5}, {7, 4 / 5}}]]General solution for a quasilinear first-order partial differential equation:
DSolveValue[2D[u[x, y], x] + 5D[u[x, y], y] == u[x, y] ^ 2 + 1, u[x, y], {x, y}]//QuietInitial value problem for a scalar conservation law:
DSolveValue[{D[u[x, y], x] + u[x, y] D[u[x, y], y] == 0,
u[x, 0] == 1 / (x + 1)}, u[x, y], {x, y}]Plot3D[%, {x, 0, 3}, {y, 0, 2}]Complete integral for a nonlinear first-order Clairaut equation:
DSolveValue[u[x, y] == x D[u[x, y], x] + y D[u[x, y], y] + Sin[D[u[x, y], x] + D[u[x, y], y]] , u[x, y], {x, y}]//QuietHyperbolic Partial Differential Equations (11)
Initial value problem for the wave equation:
weqn = D[u[x, t], {t, 2}] == D[u[x, t], {x, 2}];ic = {u[x, 0] == E ^ (-x ^ 2), Derivative[0, 1][u][x, 0] == 1};DSolveValue[{weqn, ic}, u[x, t], {x, t}]The wave propagates along a pair of characteristic directions:
Plot3D[Evaluate[%], {x, -7, 7}, {t, 0, 4}, PlotRange -> All]Initial value problem for the wave equation with piecewise initial data:
weqn = D[u[x, t], {t, 2}] == D[u[x, t], {x, 2}];ic = {u[x, 0] == UnitBox[x] + UnitTriangle[x / 3], Derivative[0, 1][u][x, 0] == 0};DSolveValue[ {weqn, ic}, u[x, t], {x, t}]//Simplify//TraditionalFormDiscontinuities in the initial data are propagated along the characteristic directions:
Plot3D[Evaluate[%], {x, -7, 7}, {t, 0, 4}, PlotRange -> All, PlotPoints -> 250, Exclusions -> None]Initial value problem with a pair of decaying exponential functions as initial data:
weqn = D[u[x, t], {t, 2}] == D[u[x, t], {x, 2}];ic = {u[x, 0] == E ^ (-(x - 6) ^ 2) + E ^ (-(x + 6) ^ 2),
Derivative[0, 1][u][x, 0] == 1 / 2};sol = DSolveValue[ {weqn, ic}, u[x, t], {x, t}]Plot3D[Evaluate[sol], {x, -30, 30}, {t, 0, 20}, PlotRange -> All, Exclusions -> All, PlotPoints -> 30, WorkingPrecision -> 20]//QuietInitial value problem for an inhomogeneous wave equation:
weqn = {D[u[x, t], {t, 2}] == D[u[x, t], {x, 2}] + m};ic = {u[x, 0] == Sin[x] - Cos[3 * x] / E ^ (Abs[x] / 6),
Derivative[0, 1][u][x, 0] == 0};sol = DSolveValue[{weqn, ic}, u[x, t], {x, t}]Visualize the solution for different values of m:
Table[Plot3D[Evaluate[sol], {x, -7, 7}, {t, 0, 4}, PlotRange -> All, Ticks -> False], {m, {-1, 0, 1}}]Initial value problem for the wave equation with a Dirichlet condition on the half-line:
weqn = D[u[x, t], {t, 2}] == D[u[x, t], {x, 2}];ic = {u[x, 0] == Piecewise[{{Sin[x] ^ 2, Pi < x < 2Pi}}], Derivative[0, 1][u][x, 0] == 0};bc = u[0, t] == 0;sol = DSolveValue[{weqn, ic, bc}, u[x, t], {x, t}];Plot3D[Evaluate[sol], {x, 0, 12}, {t, 0, 10}, Exclusions -> None, PlotRange -> All, PlotPoints -> 120]The wave bifurcates starting from the initial data:
Grid[Partition[Table[Plot[Evaluate[sol], {x, 0, 20},
Exclusions -> None, PlotRange -> All], {t, 0, 12}], 3], ItemSize -> 10]Initial value problem for the wave equation with a Neumann condition on the half-line:
weqn = D[u[x, t], {t, 2}] == D[u[x, t], {x, 2}];ic = {u[x, 0] == Sin[x] ^ 3, Derivative[0, 1][u][x, 0] == 1 - E ^ (-x / 10)};bc = Derivative[1, 0][u][0, t] == 1;sol = DSolveValue[{weqn, ic , bc }, u[x, t], {x, t}];Plot3D[Evaluate[sol], {x, 0, 20}, {t, 0, 2}, Exclusions -> None, PlotRange -> All]In this example, the wave evolves to a non-oscillating function:
Grid[Partition[Table[Plot[Evaluate[sol], {x, 0, 20},
Exclusions -> None], {t, 0, 12}], 3], ItemSize -> 8]Dirichlet problem for the wave equation on a finite interval:
weqn = D[u[x, t], {t, 2}] == D[u[x, t], {x, 2}];ic = {u[x, 0] == x ^ 2(Pi - x), Derivative[0, 1][u][x, 0] == 0};bc = {u[0, t] == 0, u[Pi, t] == 0};The solution is an infinite trigonometric series:
sol = DSolveValue[{weqn, ic, bc}, u[x, t], {x, t}]Extract the first three terms from the Inactive sum:
asol = TruncateSum[sol, 3]Plot3D[asol, {x, 0, Pi}, {t, 0, 4Pi}, ColorFunction -> Hue]The wave executes periodic motion in the vertical direction:
Plot[Evaluate[Table[asol, {t, 0, 7}]], {x, 0, Pi}]Dirichlet problem for the wave equation in a rectangle:
weqn = D[u[x, y, t], {t, 2}] == Laplacian[u[x, y, t], {x, y}];ic = {u[x, y, 0] == (1 / 10)(x - x ^ 2)(2y - y ^ 2), Derivative[0, 0, 1][u][x, y, 0] == 0};bc = {u[x, 0, t] == 0,
u[0, y, t] == 0, u[1, y, t] == 0, u[x, 2, t] == 0};The solution is a doubly infinite trigonometric series:
(sol = FullSimplify[DSolveValue[{weqn, ic, bc}, u[x, y, t], {x, y, t}], K[1]∈Integers && K[3]∈Integers && K[1] ≥ 1 && K[3] ≥ 1])//TraditionalFormExtract a few terms from the Inactive sum:
h[x_, y_, t_] = TruncateSum[sol, 3]The two-dimensional wave executes periodic motion in the vertical direction:
Animate[Plot3D[h[x, y, t], {x, 0, 1}, {y, 0, 2}, Ticks -> False, PlotRange -> {-1 / 36, 1 / 36}, MeshStyle -> Red, PerformanceGoal -> "Quality"], {t, 0, 8}, SaveDefinitions -> True, DefaultDuration -> 12]Dirichlet problem for the wave equation in a circular disk:
reqn = r D[u[r, t], {t, 2}] == D[r D[u[r, t], r], r];ic = {u[r, 0] == 1, Derivative[0, 1][u][r, 0] == r / 3};bc = u[1, t] == 0;The solution is an infinite Bessel series:
(sol = DSolveValue[{reqn, ic, bc}, u[r, t], {r, t}]//FullSimplify)//TraditionalFormExtract the first three terms from the Inactive sum:
h[r_, t_] = TruncateSum[sol, 3]//N;Plot3D[h[r, 0.7] /. {r -> Sqrt[x ^ 2 + y ^ 2]}, {x, y}∈Disk[], PlotRange -> All, Ticks -> None]General solution for a second-order hyperbolic partial differential equation:
DSolveValue[12 D[u[x, t], {x, 2}] == D[u[x, t], {t, 2}] + D[u[x, t], x, t], u[x, t], {x, t}]Hyperbolic partial differential equation with non-rational coefficients:
DSolveValue[D[u[x, y], {x, 2}] - 2Sin[x] D[u[x, y], x, y] - Cos[x] ^ 2 D[u[x, y], {y, 2}] - Cos[x]D[u[x, y], y] == 0, u[x, y], {x, y} ]Inhomogeneous hyperbolic partial differential equation with constant coefficients:
DSolveValue[3D[u[x, t], {x, 2}] - D[u[x, t], {t, 2}] + D[u[x, t], x, t] == 1, u[x, t], {x, t}]Initial value problem for an inhomogeneous linear hyperbolic system with constant coefficients:
eqns = {D[u[x, t], t] == D[v[x, t], x] + 1, D[v[x, t], t] == -D[u[x, t], x] - 1};ic = {u[x, 0] == Cos[x] ^ 2, v[x, 0] == Sin[x]};sol = DSolveValue[{eqns, ic}, {u[x, t], v[x, t]}, {x, t}]//FullSimplifyPlot3D[sol//Evaluate, {x, 0, 4}, {t, 0, 3}, PlotRange -> {-70, 120}]Parabolic Partial Differential Equations (7)
Initial value problem for the heat equation:
heqn = D[u[x, t], t] == D[u[x, t], {x, 2}];ic = u[x, 0] == E ^ (-x ^ 2);sol = DSolveValue[{heqn, ic }, u[x, t], {x, t}]Plot3D[Evaluate[sol], {x, -5, 5}, {t, 0, 4}, PlotRange -> All]Visualize the diffusion of heat with the passage of time:
Plot[Evaluate[Table[sol, {t, 0, 4}]], {x, -5, 5}, PlotRange -> All, Filling -> Axis]//QuietInitial value problem for the heat equation with piecewise initial data:
heqn = D[u[x, t], t] == D[u[x, t], {x, 2}];ic = u[x, 0] == UnitBox[x];The solution is given in terms of the error function Erf:
sol = DSolveValue[{heqn, ic }, u[x, t], {x, t}]Discontinuities in the initial data are smoothed instantly:
Plot3D[Evaluate[sol], {x, -2, 2}, {t, 0, 1}, PlotRange -> All, PlotPoints -> 250]Initial value problem for an inhomogeneous heat equation:
heqn = D[u[x, t], t] == D[u[x, t], {x, 2}] + m;ic = u[x, 0] == Sin[x];sol = DSolveValue[{heqn, ic }, u[x, t], {x, t}]Visualize the growth of the solution for different values of the parameter m:
Table[Plot3D[Evaluate[sol] /. {m -> i}, {x, -7, 7}, {t, 0, 4}, PlotRange -> All, Axes -> False], {i, {2, 0, -2}}]Dirichlet problem for the heat equation on a finite interval:
heqn = D[u[x, t], t] == D[u[x, t], {x, 2}];ic = u[x, 0] == x(3 - x) ^ 2;bc = {u[0, t] == 0, u[3, t] == 0};The solution is a Fourier sine series:
sol = DSolveValue[{heqn, ic, bc }, u[x, t], {x, t}]Extract three terms from the Inactive sum:
asol = TruncateSum[sol, 3]Plot3D[asol//Evaluate, {x, 0, 3}, {t, 0, 3 / 2}, Exclusions -> None, PlotRange -> All]Neumann problem for the heat equation on a finite interval:
heqn = D[u[x, t], t] == D[u[x, t], {x, 2}];ic = u[x, 0] == x(3 - x);bc = {Derivative[1, 0][u][0, t] == 0, Derivative[1, 0][u][3, t] == 0};The solution is a Fourier cosine series:
sol = DSolveValue[{heqn, ic, bc }, u[x, t], {x, t}]Extract a few terms from the Inactive sum:
asol = TruncateSum[sol, 4]Plot3D[asol//Evaluate, {x, 0, 3}, {t, 0, 1}, Exclusions -> None, PlotRange -> All]asol /. t -> ∞Visualize the evolution of the solution to its steady state:
Plot[Evaluate[Table[asol, {t, 0, 1, 0.2}]], {x, 0, 3}, PlotRange -> All, Filling -> Axis]Dirichlet problem for the heat equation in a disk:
rheqn = r D[u[r, t], t] == D[r D[u[r, t], r], r];ic = u[r, 0] == 1 - r;bc = u[1, t] == 0;The solution is an infinite Bessel series:
(sol = DSolveValue[{rheqn, ic, bc}, u[r, t], {r, t}])//TraditionalFormExtract a few terms from the Inactive sum:
h[r_, t_] = TruncateSum[sol, 3]//N;Visualize the individual terms of the solution at time t=0.1:
Table[Plot3D[h[r, 0.1][[i]] /. {r -> Sqrt[x ^ 2 + y ^ 2]}//Evaluate, {x, y}∈Disk[], Ticks -> None], {i, 3}]Boundary value problem for the Black–Scholes equation:
BlackScholesPDE = D[v[t, s], t] + 1 / 2σ ^ 2 s ^ 2 D[v[t, s], {s, 2}] + (r - q) s D[v[t, s], s] - r v[t, s] == 0;bc = v[T, s] == ψ[s];DSolveValue[{BlackScholesPDE, bc}, v[t, s], {t, s}]Elliptic Partial Differential Equations (9)
Dirichlet problem for the Laplace equation in the upper half-plane:
leqn = Laplacian[u[x, y], {x, y}] == 0;bc = u[x, 0] == UnitBox[x];sol = DSolveValue[{leqn, bc}, u[x, y], {x, y}]Discontinuities in the boundary data are smoothed out:
Plot3D[sol, {x, -3, 3}, {y, 0, 5}, PlotRange -> All, Exclusions -> None]Dirichlet problem for the Laplace equation in the right half-plane:
leqn = Laplacian[u[x, y], {x, y}] == 0;bc = u[0, y] == Sinc[y];sol = DSolveValue[{leqn, bc}, u[x, y], {x, y}]Plot3D[sol, {y, -10, 10}, {x, 0, 5}, PlotRange -> All]Dirichlet problem for the Laplace equation in the first quadrant:
leqn = Laplacian[u[x, y], {x, y}] == 0;bc = {u[x, 0] == (-1 / ((x - 2) ^ 2 + 3)), u[0, y] == (1 / ((y - 3) ^ 2 + 1))};sol = DSolveValue[{leqn, bc}, u[x, y], {x, y}];Plot3D[sol, {x, 0, 10}, {y, 0, 7}, PlotRange -> All]Neumann problem for the Laplace equation in the upper half-plane:
leqn = Laplacian[u[x, y], {x, y}] == 0;bc = Derivative[0, 1][u][x, 0] == UnitBox[x];sol = DSolveValue[{leqn, bc}, u[x, y], {x, y}]Plot3D[sol, {x, -3, 3}, {y, 0, 5}, PlotRange -> All, Exclusions -> None]Dirichlet problem for the Laplace equation in a rectangle:
leqn = Laplacian[u[x, y], {x, y}] == 0;bc = {u[x, 0] == x ^ 2(1 - x), u[x, 2] == 0, u[0, y] == 0, u[1, y] == 0};The solution is an infinite trigonometric series:
sol = FullSimplify[DSolveValue[{leqn, bc}, u[x, y], {x, y}]]Extract a few terms from the Inactive sum:
asol = TruncateSum[sol, 4]Plot3D[asol, {x, 0, 1}, {y, 0, 2}, PlotRange -> All]Dirichlet problem for the Laplace equation in a disk:
leqn = Laplacian[u[r, θ], {r, θ}, "Polar"] == 0;bc = u[3, θ] == Sin[6θ];sol = DSolveValue[{leqn, bc}, u[r, θ], {r, θ}]Plot3D[Evaluate[sol /. {r -> Sqrt[x ^ 2 + y ^ 2], θ -> ArcTan[x, y]}], {x, y}∈Disk[{0, 0}, 3], PlotRange -> All, Exclusions -> None]Dirichlet problem for the Laplace equation in an annulus:
leqn = D[u[r, θ], {r, 2}] + (1 / r) D[u[r, θ], r] + (1 / r ^ 2) D[u[r, θ], {θ, 2}] == 0;bc = {u[1, θ] == 0, u[2, θ] == 5};sol = DSolveValue[{leqn, bc}, u[r, θ], {r, θ}]Plot3D[Evaluate[sol /. {r -> Sqrt[x ^ 2 + y ^ 2], θ -> ArcTan[x, y]}], {x, y}∈Annulus[{0, 0}, {1, 2}], PlotRange -> All, Exclusions -> None]Dirichlet problem for the Poisson equation in a rectangle:
peqn = Laplacian[u[x, y], {x, y}] == 6x - 6y;bc = {u[x, 0] == 1 + 11x + x ^ 3, u[x, 2] == -7 + 11x + x ^ 3, u[0, y] == 1 - y ^ 3, u[4, y] == 109 - y ^ 3};sol = DSolveValue[{peqn, bc}, u[x, y], {x, y}]Dirichlet problem for the Helmholtz equation in a rectangle:
heqn = {Laplacian[u[x, y], {x, y}] + 5 u[x, y] == 0};bc = {u[x, 0] == UnitTriangle[x - 2], u[x, 2] == 0, u[0, y] == 0, u[4, y] == 0};(sol = DSolveValue[{heqn, bc}, u[x, y], {x, y}])//TraditionalFormExtract a finite number of terms from the Inactive sum:
fsol = TruncateSum[sol, 30];Visualize the approximate solution:
Plot3D[fsol//Evaluate, {x, 0, 4}, {y, 0, 2}, PlotRange -> All]General Partial Differential Equations (6)
A potential-free Schrödinger equation with Dirichlet boundary conditions:
eqn = I ℏ D[ψ[x, t], t] == (-ℏ^2/2m) D[ψ[x, t], {x, 2}];
DSolveValue[{eqn, ψ[a, t] == 0, ψ[b, t] == 0}, ψ[x, t], {x, t}]Extract the first four terms in the solution:
u[x_, t_] = TruncateSum[%, 4]For any choice of the four constants C[k], ψ obeys the equation and boundary conditions:
Simplify[{eqn, ψ[a, t] == 0, ψ[b, t] == 0} /. ψ -> u]Initial value problem for a Schrödinger equation with Dirichlet boundary conditions:
eqn = I D[ψ[x, t], t] == -2 D[ψ[x, t], {x, 2}];
f[x_] := -350 + 155 x - 22 x^2 + x^3
sol = DSolveValue[{eqn, ψ[5, t] == 0, ψ[10, t] == 0, ψ[x, 2] == f[x]}, ψ, {x, t}]Define a family of partial sums of the solution:
u[k_Integer] = TruncateSum[sol, k]For each k, uk satisfies the differential equation:
Table[eqn /. ψ -> u[k], {k, 4}]//SimplifyThe boundary conditions are also satisfied:
Table[{u[k][5, t] == 0, u[k][10, t] == 0}, {k, 4}]The initial condition is only satisfied for u∞, but there is rapid convergence at t==2:
Grid@Partition[Table[Plot[{u[k][x, 2], f[x]}, {x, 5, 10}, ImageSize -> 200], {k, 4}], 2]Solve a Schrödinger equation with potential over the reals:
eqn = I D[ψ[x, t], t] == -D[ψ[x, t], {x, 2}] + 2 x^2ψ[x, t];sol = DSolveValue[{eqn, ψ[-∞, t] == 0, ψ[∞, t] == 0}, ψ[x, t], {x, t}]Extract the first two terms in the solution:
u[x_, t_] = TruncateSum[sol, 2]For any values of the constants C[0] and C[1], the equation is satisfied:
Simplify[eqn /. ψ -> u]The conditions at infinity are also satisfied:
Limit[u[x, t], x -> ∞]Limit[u[x, t], x -> -∞]Although the function is time dependent, its ![]() -norm is constant:
-norm is constant:
Integrate[Abs[u[x, t]]^2, {x, -∞, ∞}, Assumptions -> t∈Reals]Initial value problem for Burgers' equation with viscosity ν:
BurgersEqn = D[u[x, t], t] + u[x, t]D[u[x, t], x] == ν D[u[x, t], {x, 2}];sol = DSolveValue[{BurgersEqn, u[x, 0] == UnitBox[x]}, u[x, t], {x, t}];(dsol = sol//FullSimplify)//TraditionalFormPlot the solution at different times for ν=1/40:
Quiet[Plot[Table[dsol /. {ν -> 1 / 40}, {t, 1 / 100, 7}]//Evaluate, {x, -2, 3.3}, PlotRange -> All, Filling -> Axis, WorkingPrecision -> 20]]Plot the solution for different values of ν:
Table[Plot3D[dsol//Evaluate, {x, -2, 2}, {t, 0, 5}, PlotRange -> All, Ticks -> False], {ν, {2 / 3, 1 / 6, 1 / 14}}]Boundary value problem for the Tricomi equation:
TricomiEqn = D[u[x, y], {x, 2}] + y D[u[x, y], {y, 2}] == 0;DSolveValue[{TricomiEqn, u[x, 0] == 0, Derivative[0, 1][u][x, 0] == x ^ 2}, u[x, y], {x, y}]Plot3D[%//Evaluate, {x, -3, 3}, {y, 0, 5}]Traveling wave solution for the Korteweg–de Vries (KdV) equation:
KdV = {D[u[x, t], t] + D[u[x, t], {x, 3}] + 6u[x, t]D[u[x, t], x] == 0};sol = DSolveValue[KdV, u[x, t], {x, t}]//QuietObtain a particular solution for a fixed choice of arbitrary constants:
psol = sol /. {C[1] -> 1, C[2] -> -4, C[3] -> 1 / 4}//SimplifyThe wave travels to the right without changing its shape:
Plot[Evaluate[Table[psol, {t, 1, 12, 3}]], {x, -7, 35}, PlotRange -> All, Filling -> Axis, Epilog -> {Arrow[{{5, 1.6}, {9, 1.6}}], Arrow[{{17, 1.6}, {21, 1.6}}], Arrow[{{29, 1.6}, {33, 1.6}}]}]Partial Differential Equations over Regions (3)
Dirichlet problem for the Laplace equation in a rectangle:
leqn = Laplacian[u[x, y], {x, y}] == 0;dcond = DirichletCondition[u[x, y] == Piecewise[{{UnitTriangle[2 x - 1], y == 0 || y == 2}}, 0], True];Ω = Rectangle[{0, 0}, {1, 2}];(sol = FullSimplify[DSolveValue[{leqn, dcond}, u[x, y], {x, y}∈Ω]])//TraditionalFormExtract the first 100 terms from the Inactive sum:
asol = TruncateSum[sol, 100];Visualize the solution on the rectangle:
Plot3D[asol//Evaluate, {x, y}∈Ω, PlotRange -> All, PlotStyle -> Hue[0.2]]Dirichlet problem for the Laplace equation in a disk:
leqn = Laplacian[u[x, y], {x, y}] == 0;dcond = DirichletCondition[u[x, y] == Sin[6ArcTan[y / x]], True];Ω = Disk[{0, 0}, 3];sol = FullSimplify[DSolveValue[{leqn, dcond}, u[x, y], {x, y}∈Ω]]Visualize the solution in the disk:
Plot3D[sol//Evaluate, {x, y}∈Ω, PlotRange -> All, PlotStyle -> Hue[0.5]]Dirichlet problem for the Laplace equation in a right half-plane:
leqn = Laplacian[u[x, y], {x, y}] == 0;dcond = DirichletCondition[u[x, y] == 1 / (1 + x ^ 2), True];Ω = HalfPlane[{{0, 0}, {1, 0}}, {0, 1}];sol = DSolveValue[{leqn, dcond}, u[x, y], {x, y}∈Ω]Visualize the solution in the half-plane:
Plot3D[sol//Evaluate, {x, y}∈Ω, PlotRange -> All, PlotStyle -> Green]Fractional Differential Equations (8)
Solve a fractional differential equation of order 1/2:
sol = DSolveValue[CaputoD[y[x], {x, 1 / 2}] - 3 y[x] == 0, y[x], x]CaputoD[y[x], {x, 1 / 2}] == 3y[x] /. y[x] -> sol//FullSimplifysol = DSolveValue[{CaputoD[y[x], {x, 1 / 2}] - 3 y[x] == 0, y[0] == 5}, y[x], x]Plot[sol, {x, 0, 1}]Solve a fractional differential equation containing CaputoD of order 0.7:
sol = DSolveValue[CaputoD[y[x], {x, 0.7}] + 3 y[x] == 0, y[x], x]CaputoD[y[x], {x, 0.7}] + 3y[x] == 0 /. y[x] -> sol//FullSimplifyAdd initial conditions and plot the solution:
sol = DSolveValue[{CaputoD[y[x], {x, 0.7}] + 3 y[x] == 0, y[0] == 4}, y[x], x];
Plot[sol, {x, 0, 1}]Solve a fractional differential equation containing two Caputo derivatives of different orders:
sol = DSolveValue[{CaputoD[y[x], {x, 3 / 4}] == -2CaputoD[y[x], {x, 1 / 2}] + y[x], y[0] == 1}, y[x], x]Plot[sol, {x, 0, 1}]Solve a non-homogeneous fractional differential equation of order 1/7:
sol = DSolveValue[{CaputoD[y[x], {x, 1 / 7}] == 8 (1 - y[x]), y[0] == 2}, y, x]{CaputoD[y[x], {x, 1 / 7}] == 8 (1 - y[x]), y[0] == 2} /. y -> sol//SimplifySolve a system of two fractional differential equations:
eqns = {CaputoD[x1[t], {t, 0.95}] == 2x1[t] - x2[t], CaputoD[x2[t], {t, 0.95}] == 4x1[t] - 3x2[t], x1[0] == 1.2, x2[0] == 4.2};sol = DSolveValue[eqns, {x1, x2}, t]eqns /. {x1 -> sol[[1]], x2 -> sol[[2]]}//SimplifyParametrically plot the solution:
ParametricPlot[Evaluate[{sol[[1]][t], sol[[2]][t]}], {t, 0, 2}]Solve a system of two fractional ODEs in vector form:
m = {{0, 1}, {-1, 0}};
a = 16 / 17;
v = {-3, 5};
sol = DSolveValue[{CaputoD[x[t], {t, a}] == m. x[t], x[0] == v}, Element[x[t], Vectors[2]], t]Plot[Evaluate[sol], {t, 0, 10}]Parametrically plot the solution:
ParametricPlot[Evaluate[sol], {t, 0, 20}]Solve a system of three fractional differential equations in vector form:
m = {{-1, 0, 0}, {2, 1, -9}, {3, 6, 1}};
a = 0.95;
v = {-3, 5, 0};sol = DSolveValue[{CaputoD[x[t], {t, a}] == m. x[t], x[0] == v}, Element[x[t], Vectors[3]], t]Plot[Evaluate[sol], {t, 0, 1}]Solve a fractional wave equation:
a = 19 / 10;
fweqn = CaputoD[y[t, x], {t, a}] == D[y[t, x], {x, 2}];
ic = {y[0, x] == Sin[Pi x], Derivative[1, 0][y][0, x] == 0, y[t, 0] == 0, y[t, 1] == 0};sol = DSolveValue[{fweqn, ic}, y[t, x], {t, x}]Plot3D[sol, {x, -5, 5}, {t, 0, 1}, PlotPoints -> 25]System Models (9)
Calculate the OutputResponse and StateResponse of the StateSpaceModel for a sinusoidal input:
DSolveValue[Sin[t] -> StateSpaceModel[{{{a}}, {{b}}, {{c}}, {{d}}}], "OutputResponse", t]DSolveValue[Sin[t] -> StateSpaceModel[{{{a}}, {{b}}, {{c}}, {{d}}}], "StateResponse", t]The output response of a transfer function model to a sinusoidal input:
DSolveValue[Sin[10t] -> TransferFunctionModel[{{{1}}, 1 + s}, s], "OutputResponse", t]Find the step response, impulse response and ramp response for a transfer function model:
tfm = TransferFunctionModel[{{{1}}, 5 + s + s^2}, s];sr = DSolveValue[tfm, "StepResponse", t]//PiecewiseExpandir = DSolveValue[tfm, "ImpulseResponse", t]rr = DSolveValue[tfm, "RampResponse", t]//PiecewiseExpandPlot[{sr, ir, rr}, {t, 0, 10}, PlotRange -> All, PlotLegends -> {"Step response", "Impulse response", "Ramp response"}]The response of a state-space model for nonzero initial conditions:
DSolveValue[{0 -> StateSpaceModel[{{{-2, 0.8, 0}, {-0.8, -2, 0}, {0, 0, -1}}, {{1}, {0}, {-1}}, {{1, 0, 0}}, {{0}}},
SamplingPeriod -> None, SystemsModelLabels -> None], {1, 0.1, 1}}, "OutputResponse", t]Response for a multiple-input, multiple-output transfer function model:
DSolveValue[{Sin[2t - Pi / 2], Sin[t]} -> TransferFunctionModel[{{{1, 1}, {1, 1}}, {{s, 1 + s},
{2 + s, 3 + s}}}, s], "OutputResponse", {t, 0, 20}]Plot[Evaluate@%, {t, 0, 20}]Output responses for a state-space model:
sys = StateSpaceModel[TransferFunctionModel[{{{1, 1}}, {{-a + s,
-b + s}}}, s]]DSolveValue[Sin[t] -> sys, "OutputResponse", t]This returns the sum of responses:
DSolveValue[Sin[t] -> sys, {"OutputResponse", #1 + #2&}, t]The state response for a generic continuous-time system:
Expand[DSolveValue[{u[t] -> StateSpaceModel[{{{a}}, {{b}}}, SamplingPeriod -> None,
SystemsModelLabels -> None], {Subscript[x, 0]}}, "StateResponse", t]]The response to a unit step input:
DSolveValue[{UnitStep[t] -> StateSpaceModel[{{{a}}, {{b}}}, SamplingPeriod -> None,
SystemsModelLabels -> None], {Subscript[x, 0]}}, "StateResponse", t]The state response of a descriptor StateSpaceModel:
Expand[DSolveValue[{u[t] -> StateSpaceModel[{{{a}}, {{b}}, {{c}}, {{d}},
{{e}}}, SamplingPeriod -> None, SystemsModelLabels -> None], {Subscript[x, 0]}}, "StateResponse", t]]The output response of a descriptor StateSpaceModel:
Expand[DSolveValue[{u[t] -> StateSpaceModel[{{{a}}, {{b}}, {{c}}, {{d}},
{{e}}}, SamplingPeriod -> None, SystemsModelLabels -> None], {Subscript[x, 0]}}, "OutputResponse", t]]Generalizations & Extensions (2)
Obtain an expression for the derivative of the solution:
DSolveValue[{y''[x] + y[x] == 0, y[0] == 0, y'[0] == 1}, y'[x], x]No boundary condition gives two generated parameters:
DSolveValue[y''[x] + 4y[x] == 0, y, x]DSolveValue[{y''[x] + 4y[x] == 0, y[0] == 1}, y, x]DSolveValue[{y''[x] + 4y[x] == 0, y[0] == 1, y'[0] == 4}, y, x]Options (5)
Assumptions (1)
Solve an eigenvalue problem for a linear second-order differential equation:
DSolveValue[{y''[x] + λy[x] == 0, y[0] == 0, y[π] == 0}, y[x], x]Use Assumptions to specify a range for the parameter λ:
DSolveValue[{y''[x] + λy[x] == 0, y[0] == 0, y[π] == 0}, y[x], x, Assumptions -> 0 < λ < 20]DiscreteVariables (1)
GeneratedParameters (2)
Use differently named constants:
DSolveValue[y''[x] == y[x], y[x], x, GeneratedParameters -> d]DSolveValue[y''[x] == y[x], y[x], x, GeneratedParameters -> (Subscript[c, #]&)]Generate uniquely named constants of integration:
DSolveValue[y''[x] == y[x], y[x], x, GeneratedParameters -> Unique[C]]The constants of integration are unique across different invocations of DSolveValue:
DSolveValue[y''[x] == y[x], y[x], x, GeneratedParameters -> Unique[C]]Method (1)
Solve a linear ordinary differential equation:
DSolveValue[{y''[x] + y[x] == 0, y[0] == 0, y'[0] == 1}, y[x], x]Obtain a solution in terms of DifferentialRoot:
DSolveValue[{y''[x] + y[x] == 0, y[0] == 0, y'[0] == 1}, y[x], x, Method -> "Holonomic"]Applications (41)
Ordinary Differential Equations (12)
Solve a logistic (Riccati) equation:
sol = DSolveValue[{y'[x] == y[x](1 - y[x] / 27), y[0] == a}, y, x]//QuietPlot the solution for different initial values:
Plot[sol[x] /. {{a -> 1 / 13}, {a -> 1 / 2}, {a -> 4}}//Evaluate, {x, 0, 18}]Solve a linear pendulum equation:
sol = DSolveValue[{y''[x] + y[x] == 0, y[0] == 1, y'[0] == 1 / 3}, y , x]Plot[sol[x], {x, 0, 17}]Displacement of a linear, damped pendulum:
sol = DSolveValue[{y''[x] + 3y'[x] + 40 y[x] == 0, y[0] == 1, y'[0] == 1 / 3}, y, x]Plot[sol[x], {x, 0, 4}, PlotRange -> All]Directly find the solution in phase space:
phase[x_] = DSolveValue[{y''[x] + 3y'[x] + 40 y[x] == 0, y[0] == 1, y'[0] == 1 / 3}, {y[x], y'[x]}, x];ParametricPlot[phase[x], {x, 0, 4}, PlotRange -> All, AspectRatio -> 1]Study the phase portrait of a dynamical system:
{sol1, sol2} = DSolveValue[{x'[t] == -2y[t] + 3x[t], y'[t] == 15x[t] - y[t], x[0] == a, y[0] == b}, {x, y}, t];ParametricPlot[Evaluate[Table[{sol1[t], sol2[t]} /. {a -> 1 / (13 + m), b -> 1 / (15 + m)}, {m, 0, 20, 7}]], {t, -2, 2}]Find a power series solution when the exact solution is known:
DSolveValue[{y'[x] + Exp[x]y[x] == 1, y[0] == 3}, y[x] , x]Series[%, {x, 0, 7}]Compute the limiting value of the solution at Infinity:
DSolveValue[{x''[t] - E ^ (-x'[t]) + x[t] == 0, x[0] == 1, x'[0] == 5}, x[∞], t]//QuietModel a block on a moving conveyor belt anchored to a wall by a spring. Compare positions and velocities for the different values of the parameters of the system (mass of the block, belt speed, friction coefficient, spring constant):
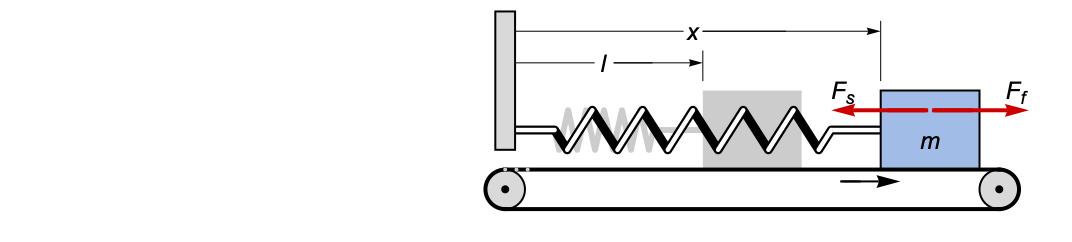
beltv[t_] = vb;
spring[x_] = k(l - x);
friction[v_] := -a(v - beltv[t]);Newton's equation for the block:
sys := {m x''[t] == spring[x[t]] + friction[x'[t]], x[0] == l, x'[0] == 0};Solve for position and velocity:
{pos[m_, k_, a_, vb_, t_], vel[m_, k_, a_, vb_, t_]} = DSolveValue[sys, {x[t], x'[t]}, {t, 0, 2}]//FullSimplifyThe block stabilizes just above the spring's natural length of ![]() :
:
l = 1;
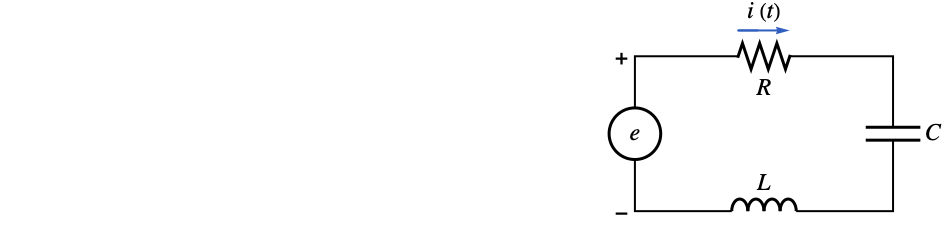
Manipulate[{Plot[{pos[m, k, a, vb, t]}, {t, 0, 2}, PlotRange -> All, PlotLabel -> "Position"], Plot[{vel[m, k, a, vb, t], vb}, {t, 0, 2}, PlotRange -> All, PlotLabel -> "Velocity"]}, {{m, 1, "mass of the block"}, 1, 10, 1}, {{k, 100, "spring constant"}, 100, 1000, 100}, {{vb, 1, "belt velocity"}, 1, 10, 1}, {{a, 5, "friction coefficient"}, 5, 45, 10}, SaveDefinitions -> True]Use component laws together with Kirchhoff's laws for connections to simulate the response of an RLC circuit to a step impulse in the voltage ![]() applied at time
applied at time ![]() :
:
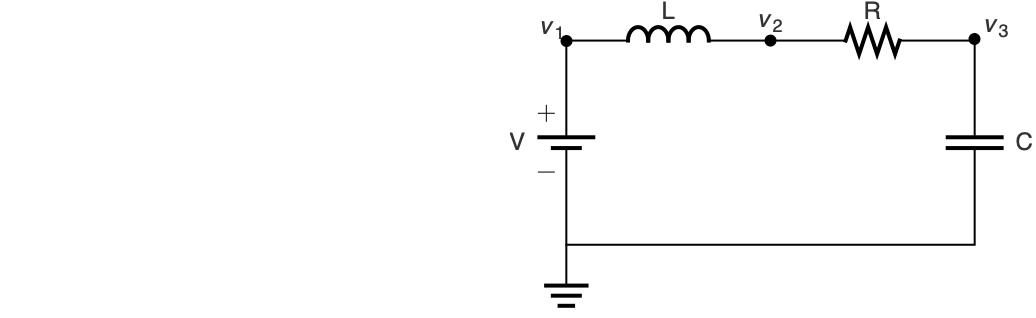
The component laws read ![]() ,
, ![]() ,
, ![]() ,
, ![]() and
and ![]() :
:
ClearAll[r, l, c];
vR[t_] := r iL[t];
vL[t_] := v1[t] - vR[t] - vC[t];
sys = {l iL'[t] == vL[t], c vC'[t] == iL[t]};v1[t_] := UnitStep[t - .01];
ic = {iL[0] == 0, vC[0] == 0};{iL1[r_, c_, l_, t_], vC1[r_, c_, l_, t_]} = DSolveValue[Flatten[{sys, ic}], {iL[t], vC[t]}, t];Visualize the response for different values of ![]() ,
, ![]() and
and ![]() :
:
Manipulate[{Plot[Evaluate[{v1[t], Re[vC1[r, c, l, t]]}], {t, 0, .03}, Filling -> {1 -> 0}, Ticks -> {Range[0.01, 0.03, 0.01], Automatic}, PlotRange -> All, PlotLabel -> "SubscriptBox[V, C][t]"], Plot[Evaluate[Re[iL1[r, c, l, t]]], {t, 0, .03}, Ticks -> {Range[0.01, 0.03, 0.01], Automatic}, PlotRange -> All, PlotLabel -> "I[t]"]}, {{r, 1, "R"}, 1, 10, 1}, {{l, 10^-2, "L"}, 10^-2, 5 10^-2, 10^-2}, {{c, 10^-4, "C"}, 10^-4, 5 10^-4, 10^-4}, SaveDefinitions -> True]Model the change in height of water in two cylindrical tanks as water flows from one tank to another through a pipe:
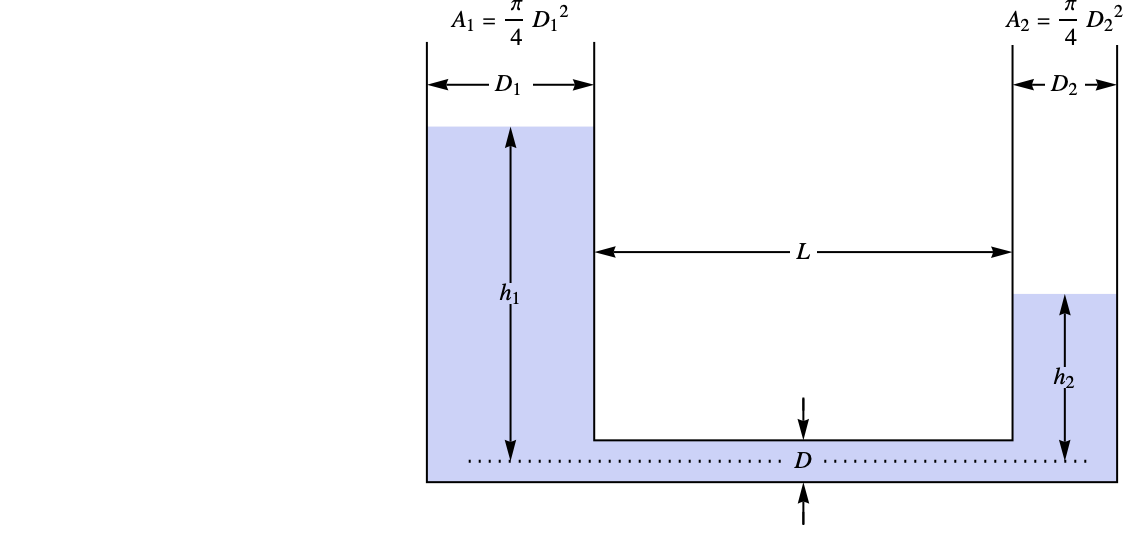
Use pressure relations ![]() and mass conservation:
and mass conservation:
p1[t_] := ρ g h1[t];
p2[t_] := ρ g h2[t];Model the flow across the pipe with the Hagen–Poiseuille relation:
flowRate = (p1[t] - p2[t])(π pipeDia ^ 4) / (128 μ pipeLen);
massConservation = {a1 h1'[t] == -flowRate, a2 h2'[t] == flowRate};
ic = {h1[0] == 1, h2[0] == 0};{h1[t_], h2[t_]} = DSolveValue[Flatten[{massConservation, ic}], {h1[t], h2[t]}, t]Visualize the solution for particular values of the parameters:
params = {pipeLen -> 0.1, pipeDia -> 0.2, a1 -> 1, a2 -> 1, ρ -> 0.2, μ -> 2 10 ^ -3, g -> 9.81};Plot[Evaluate[{h1[t], h2[t]} /. params], {t, 0, 15}, PlotRange -> All, PlotLegends -> {"SubscriptBox[h, 1][t]", "SubscriptBox[h, 2][t]"}]Solve the equation of a fractional harmonic oscillator of order 1.9:
DSolveValue[{CaputoD[x[t], {t, 1.9}] + x[t] == 0, x[0] == 1, x'[0] == 0}, x[t], t]fracsol = Plot[%, {t, 0, 20}]A fractional harmonic oscillator behaves like a damped harmonic oscillator:
dampedOsc = DSolveValue[{x''[t] + a x'[t] + x[t] == 0, x[0] == 1, x'[0] == 0}, x[t], t]//FullSimplifyFit the data for a fractional oscillator with the solution of a damped oscillator to determine the corresponding value for damping factor ![]() :
:
data = Cases[InputForm[fracsol], Line[m_] :> m, -1][[1]];
fit = FindFit[data, dampedOsc, a, t]dampedsol = Plot[dampedOsc /. fit, {t, 0, 20}];
Show[fracsol, dampedsol]Solve the equation of fractional LC electric circuit:
LCeqn[α_, l_, c_] = {CaputoD[i[t], {t, α}] + (1/l c)i[t] == 0, i[0] == 0.1, i'[0] == 0};LCsol[α_, l_, c_] := DSolveValue[LCeqn[α, l, c], i[t], t];The classical solution can be obtained for ![]() :
:
LCsol[2, l, c]Solve the LC circuit equation for ![]() :
:
LCsol[1.9, l, c]Plot the solutions for various values of equation order ![]() :
:
Plot[Evaluate[{LCsol[2, 1, 1], LCsol[1.9, 1, 1], LCsol[1.8, 1, 1]}], {t, 0, 10}, PlotLegends -> {"α=2", "α=1.9", "α=1.8"}]Solve the equation of fractional RC electric circuit:
RCeqn[α_, r_, c_] = {CaputoD[v[t], {t, α}] + (1/r c)v[t] == 0, v[0] == 20};RCsol[α_, r_, c_] := DSolveValue[RCeqn[α, r, c], v[t], t]The classical solution can be obtained for ![]() :
:
RCsol[1, r, c]Solve the RC circuit equation for ![]() :
:
RCsol[0.9, r, c]Plot the solutions for various values of equation order ![]() :
:
Plot[Evaluate[{RCsol[1, 10, 1], RCsol[0.9, 10, 1], RCsol[0.8, 10, 1]}], {t, 0, 100}, PlotLegends -> {"α=1", "α=0.9", "α=0.8"}]Hybrid Differential Equations (8)
Model a damped oscillator that gets a kick at regular time intervals:
system = {x''[t] + .1x'[t] + x[t] == 0, x[0] == 1, x'[0] == 0};
control = WhenEvent[Mod[t, 1] == 0, x'[t] -> x'[t] + 1];sol = DSolveValue[{system, control}, x, {t, 0, 50}];Plot[Evaluate[{sol[t], sol'[t]}], {t, 0, 50}]sol = DSolveValue[{x''[t] + x[t] == 0, x[0] == 0, x'[0] == 1, WhenEvent[x[t] == 0, x'[t] -> -x'[t]]}, x, {t, 0, 4π}]Plot[Evaluate[{Sin[t], sol[t]}], {t, 0, 4π}]Model a ball bouncing down steps:
c = .75;
sol = DSolveValue[{y''[t] == -9.8, y[0] == 13.5, y'[0] == 5, a[0] == 13, WhenEvent[y[t] - a[t] == 0, y'[t] -> -c y'[t]], WhenEvent[Mod[t, 1], a[t] -> a[t] - 1]}, {y, a}, {t, 0, 8}, DiscreteVariables -> {a}] ;Plot[Evaluate[{y[t], a[t]} /. Thread[{y, a} -> sol]], {t, 0, 8}, Filling -> {2 -> 0}, Exclusions -> None]In a square box, model a ball that changes direction upon impact with the side walls:
sol = DSolveValue[{x'[t] == a[t], y'[t] == b[t], x[0] == 0, y[0] == 0, a[0] == 1, b[0] == 17 / 12, WhenEvent[x[t] ^ 2 == 1, a[t] -> -a[t]], WhenEvent[y[t] ^ 2 == 1, b[t] -> -b[t]]}, {x, y}, {t, 0, 50}, DiscreteVariables -> {a, b}];ParametricPlot[{x[t], y[t]} /. Thread[{x, y} -> sol], {t, 0, 50}, Frame -> True, FrameTicks -> None, PlotRange -> 1, Axes -> False]Simulate the system ![]() stabilized with a discrete-time controller
stabilized with a discrete-time controller ![]() :
:
system = {y'[t] == y[t] + u[t], y[0] == 1, u[0] == 0};
control = WhenEvent[Mod[t, 1] == 0, u[t] -> -2y[t]];DSolveValue[{system, control}, {y, u}, {t, 0, 20}, DiscreteVariables -> u];Plot[Evaluate[{u[t], y[t]} /. {Thread[{u, y} -> %]}], {t, 0, 10}, PlotRange -> {-6, 6}, Exclusions -> None]Control a double integrator using a dead-beat discrete-time controller:
system = {x''[t] == u[t], x[0] == 1, x'[0] == 1, u[0] == -7};Use a dead-beat digital feedback controller ![]() :
:
τ = 0.5;
control = WhenEvent[Mod[t, τ] == 0, u[t] -> -(1 / τ ^ 2)x[t] - (3 / (2τ))x'[t]];DSolveValue[{system, control}, {x, u}, {t, 0, 2}, DiscreteVariables -> u];Plot[Evaluate[{x[t], x'[t], u[t]} /. Thread[{x, u} -> %]], {t, 0, 2}, PlotRange -> All, Exclusions -> None]Model the position of a moving body with 1 kg mass:
system = {x''[t] == u[t], x'[0] == x[0] == 0, u[0] == 1};Use a sampled proportional-derivative (PD) controller to keep the position constant:
kp = 1; td = 1;τ = 1; xref = 1;
control = WhenEvent[Mod[t, τ] == 0, u[t] -> kp(xref - x[t] - td x'[t])];DSolveValue[{system, control}, {x, u}, {t, 0, 12}, DiscreteVariables -> u];Plot[Evaluate[{xref, x[t], u[t]} /. Thread[{x, u} -> %]], {t, 0, 12}, Exclusions -> None]Set the physical variable a to 0 whenever it becomes negative:
sol = DSolveValue[{a'[t] == -1 / 11u[t], a[0] == 1, u[0] == 1,
WhenEvent[a[t] < 0, u[t] -> 0]}, a, {t, 0, 15}, DiscreteVariables -> u]Plot[Evaluate[sol[t]], {t, 0, 15}, PlotRange -> All]Delay Differential Equations (2)
Study the onset of chaos in a dynamical system governed by a delay differential equation:
sol = DSolveValue[{x'[t] == Sign[x[t - 2]] - x[t - 2], x[t /; t <= 0] == 0.1}, x, {t, 0, 30}];ParametricPlot[Evaluate[{x[t - 2], x[t]} /. {x -> sol}], {t, 2, 30}]Study the stability of the solutions for a linear delay differential equation:
f[λ_, μ_] := DSolveValue[{x'[t] == λ x[t] + μ x[t - 1], x[t /; t ≤ 0] == 1 - t}, x[t], {t, 0, 10}]Plot[Evaluate[{f[1 / 2, -1], f[-7 / 2, 4], f[-5, 4]}], {t, 0, 15}, Exclusions -> None]Integral Equations (4)
The tautochrone problem requires finding the curve down which a bead placed anywhere will fall to the bottom in the same amount of time. Expressing the total fall time in terms of the arc length of the curve and the speed v yields the Abel integral equation ![]() . Defining the unknown function
. Defining the unknown function ![]() by the relationship
by the relationship ![]() and using the conservation of energy equation
and using the conservation of energy equation ![]() yields the explicit equation:
yields the explicit equation:
abeleqn = T == Subsuperscript[∫, 0, y](h[z]/Sqrt[2g]Sqrt[y - z])ⅆz;Use DSolveValue to solve the integral equation:
DSolveValue[abeleqn, h[y], y]Using the relationship ![]() , solve for
, solve for ![]() :
:
dxdy = Sqrt[%^2 - 1]Starting the curve from the origin and integrating—with assumptions that ensure the integrand is real-valued—yields ![]() as a function of
as a function of ![]() :
:
x[y_] = Integrate[dxdy, {y, 0, y}, Assumptions -> (2 g T^2 /π^2y) > 1 && y > 0]Substituting values for ![]() and
and ![]() , use ParametricPlot to display the maximal tautochrone curve:
, use ParametricPlot to display the maximal tautochrone curve:
Show[ParametricPlot[{{x[y], y}, {-x[y], y}} /. {g -> 9.8, T -> 2}, {y, 0, (2(9.8)2^2/π^2)}], ImageSize -> Medium]Making the change of variables ![]() gives a simple, non-singular parametrization of the curve with
gives a simple, non-singular parametrization of the curve with ![]() :
:
c[θ_] = (g T^2/π^2){Sin[θ] + θ, 1 - Cos[θ]} ;Combining the conservation of energy equation and the chain rule ![]() produces the following differential equation for
produces the following differential equation for ![]() as a function of
as a function of ![]() :
:
FullSimplify[ (Sqrt[2g (Last[c[θMax]] - Last[c[θ]])] /Sqrt[c'[θ].c'[θ]]) , g > 0 && T > 0]teqn = θ'[t] == (% /. {θ -> θ[t], T -> 2});This equation can be solved numerically for different starting points:
Θ[t_] = Table[NDSolveValue[{teqn, θ[0] == θMax}, θ[t], {t, 0, 4}], {θMax, {-2 Pi / 3, -Pi / 2, -Pi / 4, -Pi / 12}}];Plotting the solutions show that all reach the bottom, ![]() , at the 2 second mark:
, at the 2 second mark:
Plot[Evaluate[Θ[t]], {t, 0, 4}, PlotTheme -> "Scientific"]Visualize the motion along the tautochrone:
{cShape[t_], cBeads[t_]} = {c[t], c /@ Θ[t]} /. {T -> 2, g -> 9.8};
Animate@@{ParametricPlot[cShape[s] , {s, -Pi, Pi}, ImageSize -> Medium, Epilog -> {AbsolutePointSize[8], Point[cBeads[t]]}], {t, 0, 4, Appearance -> "Labeled"}, SaveDefinitions -> True, AnimationDirection -> ForwardBackward}A spring-mass system, with an attached mass of
, has a spring constant of and a damping coefficient of . At timeieqn = 3Derivative[1][v][t] + 2 v[t] + 40 Subsuperscript[∫, 0, t]v[m]ⅆm == 50 Cos[2 t];Initial value of the velocity:
ic = v[0] == 28;Solve the integro-differential equation using DSolveValue:
sol = DSolveValue[{ieqn, ic}, v[t], t]Plot the velocity as a function of time:
Plot[sol, {t, 0, 8}, PlotRange -> All, Filling -> Axis]Visualize the motion of the physical spring-mass system:
An LRC circuit has a voltage source given by ![]() . The resistance in the circuit is
. The resistance in the circuit is
The integral equation for the current is given by:
ieqn = 5 Derivative[1][i][t] + 0.2 i[t] + (1/0.7)Subsuperscript[∫, 0, t]i[m]ⅆm == 2 Cos[t];ic = i[0] == 1;Solve the integro-differential equation using DSolveValue:
sol = DSolveValue[{ieqn, ic}, i[t], t]//FullSimplify//ChopPlot the current as a function of time:
Plot[sol, {t, 0, 80}, PlotRange -> All, Filling -> Axis]A linear Volterra integral equation is equivalent to an initial value problem for a linear differential equation. Verify this relationship for the following Volterra equation:
eqn = y[x] == x^3 + λSubsuperscript[∫, 0, x](t - x)y[t]ⅆt;Solve the integral equation using DSolveValue:
sol = DSolveValue[eqn, y[x], x]Set up the corresponding differential equation:
deqn = D[eqn, {x, 2}]Add two initial conditions since the differential equation is of second order:
init = {(eqn /. {x -> 0}), (D[eqn, x] /. {x -> 0})}The solution of the initial value problem agrees with that of the integral equation:
DSolveValue[{deqn, init}, y[x], x]//SimplifyPlot[Table[%, {λ, 1, 3, 0.5}]//Evaluate, {x, 0, 20}, Filling -> Axis]Classical Partial Differential Equations (5)
Model the vibrations of a string with fixed length, say π, using the wave equation:
eqn = D[u[x, t], {t, 2}] == D[u[x, t], {x, 2}];Specify that the ends of the string remain fixed during the vibrations:
bc = {u[0, t] == 0, u[π, t] == 0};Obtain the fundamental and higher harmonic modes of oscillation:
ic = {u[x, 0] == Sin[m x], Derivative[0, 1][u][x, 0] == 0};dsol = DSolveValue[{eqn, bc, ic}, u[x, t], {x, t}, Assumptions -> Element[m, Integers]]Visualize the vibrations of the string for these modes:
Table[Show[Plot[Table[dsol, {t, 0, 4}]//Evaluate, {x, 0, Pi}, Ticks -> False]], {m, 4}]In general, the solution is composed of an infinite number of harmonics:
ic = {u[x, 0] == x(π - x) ^ 2, Derivative[0, 1][u][x, 0] == 0};dsol = DSolveValue[{eqn, bc, ic}, u[x, t], {x, t}] /. {K[1] -> m}Extract four terms from the Inactive sum:
sol[x_, t_] = TruncateSum[dsol, 4]Visualize the vibration of the string:
Animate[Plot[sol[x, t], {x, 0, π}, PerformanceGoal -> "Quality", PlotRange -> {-5, 5}, ImageSize -> Medium], {t, 0, 12}, SaveDefinitions -> True]Model the oscillations of a circular membrane of radius 1 using the wave equation in 2D:
eqn = r D[u[r, t], {t, 2}] == D[r D[u[r, t], r], r];Specify that the boundary of the membrane remains fixed:
bc = u[1, t] == 0;Initial condition for the problem:
ic = {u[r, 0] == 0, Derivative[0, 1][u][r, 0] == 1};Obtain a solution in terms of Bessel functions:
(dsol = DSolveValue[{eqn, bc, ic}, u[r, t], {r, t}])//TraditionalFormExtract a finite number of terms from the Inactive sum:
h[r_, t_] = TruncateSum[dsol, 3]//N;Visualize the oscillations of the membrane:
Animate[Plot3D[h[r, t] /. {r -> Sqrt[x ^ 2 + y ^ 2]}, {x, y}∈Disk[], PlotRange -> {-1, 1}, Ticks -> None, Mesh -> True, MeshStyle -> {Red, Blue}, PlotStyle -> Yellow], {t, 0, 4}, SaveDefinitions -> True]Model the flow of heat in a bar of length 1 using the heat equation:
heqn = D[u[x, t], t] == D[u[x, t], {x, 2}];Specify the fixed temperature at both ends of the bar:
bc = {u[0, t] == 20, u[1, t] == 50};ic = u[x, 0] == 0;Solve the heat equation subject to these conditions:
sol = DSolveValue[{heqn, bc, ic}, u[x, t], {x, t}]Extract a few terms from the Inactive sum:
approxsol = TruncateSum[sol, 3]//ExpandVisualize the evolution of the temperature to a steady state:
Plot[Table[approxsol, {t, 0.02, 0.5, 0.07}]//Evaluate, {x, 0, 1}, AxesOrigin -> {0, 0}]Obtain the steady-state solution v[x], which is independent of time:
ssol = DSolveValue[{v''[x] == 0, v[0] == 20, v[1] == 50}, v[x], x]//ExpandThe steady-state solution is a linear function of x:
Plot[ssol, {x, 0, 1}]Model the flow of heat in a bar of length 1 that is insulated at both ends:
heqn = D[u[x, t], t] == D[u[x, t], {x, 2}];Specify that no heat flows through the ends of the bar:
bc = {Derivative[1, 0][u][0, t] == 0, Derivative[1, 0][u][1, t] == 0};ic = u[x, 0] == 20 + 80x;Solve the heat equation subject to these conditions:
sol = DSolveValue[{heqn, bc, ic}, u[x, t], {x, t}]Extract a few terms from the Inactive sum:
approxsol = TruncateSum[sol, 4]//ExpandVisualize the evolution of the temperature to the steady state value of 60°:
Plot[Table[approxsol, {t, 0.02, 0.9, 0.07}]//Evaluate, {x, 0, 1}, AxesOrigin -> {0, 0}, PlotRange -> All]Construct a complex analytic function, starting from the values of its real and imaginary parts on the ![]() axis. The real and imaginary parts, u and v, satisfy the Cauchy–Riemann equations:
axis. The real and imaginary parts, u and v, satisfy the Cauchy–Riemann equations:
creqns = {D[u[x, y], x] == D[v[x, y], y], D[v[x, y], x] == -D[u[x, y], y]};Prescribe the values of u and v on the ![]() axis:
axis:
xvals = {u[x, 0] == x ^ 3, v[x, 0] == 0};Solve the Cauchy–Riemann equations:
sol[x_, y_] = DSolveValue[{creqns, xvals}, {u[x, y], v[x, y]}, {x, y}]Verify that the solutions are harmonic functions:
Laplacian[sol[x, y], {x, y}]Visualize the streamlines and equipotentials generated by the solution:
ContourPlot[sol[x, y], {x, -5, 5}, {y, -5, 5}, ContourStyle -> {Red, Blue}, PlotTheme -> "Marketing"]Construct an analytic function from the solution:
f[x_, y_] = sol[x, y][[1]] + I sol[x, y][[2]]This represents the function ![]() :
:
(f[x, y]//Factor) /. {x + I y -> z}General Partial Differential Equations (5)
Study the evolution of a smooth solution for Burgers' equation to a shock wave in the limit when the viscosity parameter becomes infinitely small:
eqns = { D[u[x, t], t] + u[x, t]D[u[x, t], x] == ϵ D[u[x, t], {x, 2}] , u[x, 0] == Piecewise[{{1, x < 0}}]};dsol = DSolveValue[eqns, u[x, t], {x, t}]The solution is smooth for any positive value of ϵ:
Plot3D[dsol /. {ϵ -> 1 / 10}, {x, -2, 2}, {t, 0.001, 5}]The solution develops a shock discontinuity in the limit when ϵ approaches 0:
Table[Plot3D[dsol /. {ϵ -> 1 / 1000}, {x, -2, 2}, {t, 0.001, 5}, Exclusions -> All, Ticks -> None], {ϵ, {1 / 10, 1 / 100, 1 / 1000}}]//QuietAn electron constrained to move in a one-dimensional box of length d is governed by the free Schrödinger equation with Dirichlet conditions at the endpoints:
eqn = I ℏ D[ψ[x, t], t] == (-ℏ^2/2m) D[ψ[x, t], {x, 2}];
bcs = {ψ[0, t] == 0, ψ[d, t] == 0};The general solution to this equation is a sum of trigonometric-exponential terms:
DSolveValue[Join[{eqn}, bcs], ψ[x, t], {x, t}]Each term in the sum is called a stationary state as using the sine as initial conditions leads to the positional probability density ![]() being time independent. For example:
being time independent. For example:
sol1 = DSolveValue[Join[{eqn, ψ[x, 0] == Sqrt[(2/d)]Sin[Pi(x/d)]}, bcs], ψ[x, t], {x, t}]The resulting probability distribution is independent of time:
ρ1[x_, t_] = Simplify[ComplexExpand[Conjugate[sol1]sol1], d > 0]The normalization of the initial data was chosen so that the integral of the density (the total probability of finding the particle somewhere) is 1:
Integrate[ρ1[x, t], {x, 0, d}]Using any other initial condition, even one as simple as a sum of two stationary states, will lead to a complicated, time-dependent density:
sol2 = DSolveValue[Join[{eqn, ψ[x, 0] == (1/Sqrt[d])Sin[Pi(x/d)] + (1/Sqrt[d])Sin[2Pi(x/d)]}, bcs], ψ[x, t], {x, t}]This density is not stationary as t appears in the second and third cosines:
ρ2[x_, t_] = Simplify[ComplexExpand[Conjugate[sol2]sol2], d > 0]Although the probability density is time dependent, its integral is still the constant 1:
Integrate[ρ2[x, t], {x, 0, d}]Entering the mass of the electron and the value of ![]() in SI units and setting d to a typical interatomic distance of 1 nm results in the following density function:
in SI units and setting d to a typical interatomic distance of 1 nm results in the following density function:
ρe[x_, t_] = ρ2[x, t] /. {ℏ -> 1.055*^-34, m -> 9.109 * 10 ^ -31, d -> 10 ^ -9}Visualize the function over the spatial domain and one period in time:
Plot3D[ρe[x 10^-9, t 10^-15]10^-9, {x, 0, 1}, {t, 0, 3.66}, PlotTheme -> {"Grid", "LargeLabels"}, AxesLabel -> {"x (nm)", "t (fs)", "ρe (SuperscriptBox[nm, -1])"}, ImageSize -> Medium]Viewing the graph as a movie of probability densities, it can be seen that "center" of the electron moves from side to side of the box:
Animate[Plot[ρe[x, t], {x, 0, 10 ^ -9}, PerformanceGoal -> -"Quality", PlotRange -> {0, 4*^9}, ImageSize -> Medium, AxesLabel -> {"x (m)", "ρe (SuperscriptBox[m, -1])"}], {t, 0, 3.66*^-15}, SaveDefinitions -> True]Find the value of a European vanilla call option if the underlying asset price and the strike price are both $100, the risk-free rate is 5%, the volatility of the underlying asset is 20%, and the maturity period is 1 year, using the Black–Scholes model:
BlackScholesModel = {D[c[t, s], t] + 1 / 2σ ^ 2 s ^ 2 D[c[t, s], {s, 2}] + r s D[c[t, s], s] - r c[t, s] == 0, c[T, s] == Max[s - k, 0]};Solve the boundary value problem:
dsol = DSolveValue[BlackScholesModel, c[t, s], {t, s}]Compute the value of the European vanilla option:
dsol /. {t -> 0, s -> 100, k -> 100, σ -> 0.2, T -> 1, r -> 0.05}Compare with the value given by FinancialDerivative:
FinancialDerivative[{"European", "Call"}, {"StrikePrice" -> 100.00, "Expiration" -> 1}, {"InterestRate" -> 0.05, "Volatility" -> 0.2, "CurrentPrice" -> 100}]Recover a function from its gradient vector:
sol = DSolveValue[{D[f[x, y], x] == x y Cos[x y] + Sin[x y],
D[f[x, y], y] == -E^-y + x^2 Cos[x y]}, f[x, y], {x, y}]The solution represents a family of parallel surfaces:
Plot3D[Table[sol /. {C[1] -> k}, {k, 1, 22, 5}]//Evaluate, {x, 0, 10}, {y, 0, 2}, PlotRange -> All]Solve a Cauchy problem to generate Stirling numbers:
sol = DSolveValue[{(1 - x)D[u[x, y], x] == y u[x, y], u[0, y] == 1}, u[x, y], {x, y}]Use the generating function to obtain Stirling numbers:
Table[(-1) ^ i SeriesCoefficient[ Series[sol, {x, 0, 10}, {y, 0, 4}], {10, i}]10!, {i, 4}]StirlingS1[10, Range[4]]System Models (5)
Generate the impulse response for a transfer-function model:
tfm = TransferFunctionModel[{{{1}}, 5 + s + s^2}, s];ir[τ_] = DSolveValue[tfm, "ImpulseResponse", τ]Use UnilateralConvolve to get the output response of the model from a sinusoidal input:
lconv[t_] = UnilateralConvolve[ir[τ], Sin[τ], τ, t]This demonstrates the Laplace convolution of the impulse response and sinusoidal functions:
Animate[
GraphicsRow[{
Plot[{ir[τ], Sin[t - τ]}, {τ, 0, 2Pi}, ...],
Plot[ir[τ] Sin[t - τ]UnitStep[t - τ], {τ, 0, 2Pi}, ...],
Plot[lconv[τ], {τ, 0, t}, ...]}, ImageSize -> 480], {t, 0, 2Pi}]Calculate the output response from the sinusoidal input using DSolveValue:
or = DSolveValue[{Sin[t] -> tfm}, "OutputResponse", t]or - lconv[t]//FullSimplifyDetermine the steady-state output value of a stable first-order system in response to a unit step input:
y = DSolveValue[TransferFunctionModel[{{{1}}, 1 + 10*s}, s], "StepResponse", t];Subscript[y, ss] = Limit[y, t -> ∞]τ = t /. FindRoot[y == (1 - (1/E)) Subscript[y, ss], {t, 1}]With[{y1 = y /. t -> τ}, Plot[y, {t, 0, 40}, Epilog -> {Dashed, Line[{{τ, 0}, {τ, y1}, {0, y1}}], PointSize[Medium], Point[{{τ, y1}}]}]]Analyze the response of the states to each control input for a multi-input system:
ssm = StateSpaceModel[{{{0, 0, -10, 0}, {0, 0, 0, 10}, {3.7, 0, -2, 0}, {0, -0.6, 0, -5}},
{{0, 0}, {0, 0}, {8.533, 0}, {0, 8.533}}, {{0.5, 0.5, 0, 0}, {-2.113, 2.113, 0.375, 0.375}},
{{0, 0}, {0, 0}}}, SamplingPeriod -> None, SystemsModelLabels -> None];MapIndexed[Plot[#, {t, 0, 5}, PlotRange -> All, PlotLabel -> "Input " <> ToString@First@#2 <> " -> " <> " State " <> ToString@Last@#2]&, DSolveValue[UnitStep[t] -> ssm, "StateResponse", t]//Simplify//Chop, {2}]The state-space model of a production and inventory systems model with desired production rate and sales rate as inputs and actual production rate and inventory level as states:
ssm = StateSpaceModel[{{{-1, -0.1875}, {1, 0}}, {{0.1875, 0}, {0, -1}}}, SamplingPeriod -> None,
SystemsModelLabels -> None];Determine the response for a given production rate and 10% jump in sales from the initial equilibrium condition:
resp = DSolveValue[{{Subscript[u, 1], 1.1 Subscript[x, 10]} -> ssm, {Subscript[x, 10], Subscript[u, 1]}}, "StateResponse", t]//Expand//ChopPlot the response for specific initial conditions:
Plot[Evaluate[resp] /. {Subscript[x, 10] -> 1, Subscript[u, 1] -> 6}, {t, 0, 50}, PlotStyle -> {Thickness[0.005], Dashing[{0.05, 0.01}]}, PlotRange -> All, AxesOrigin -> {0, 0}, PlotLabel -> "State response", AxesLabel -> {"t"}]The Clohessy–Wiltshire equations model the relative motion between two satellites orbiting a central body:
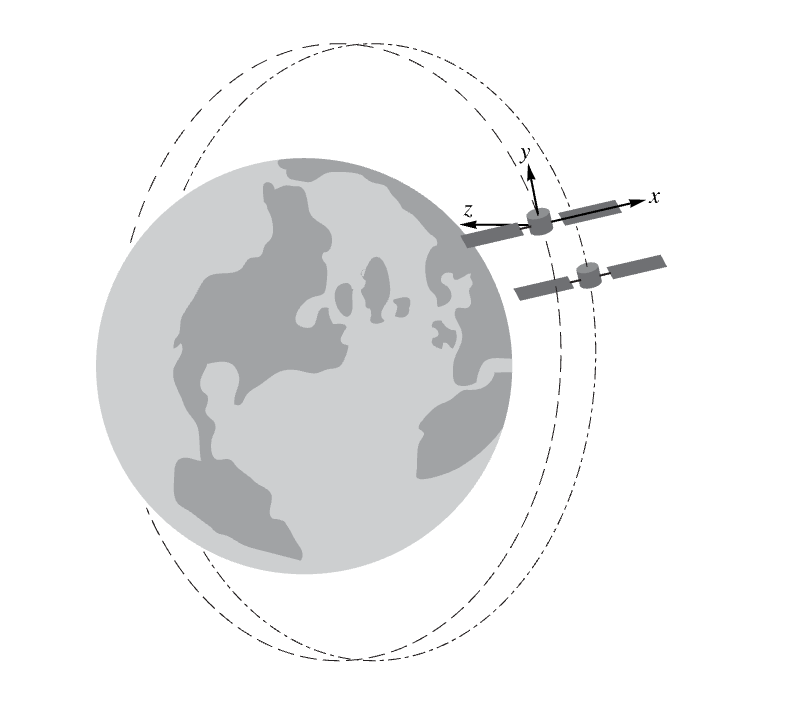
sat = StateSpaceModel[{{{0, 1, 0, 0, 0, 0}, {3*n^2, 0, 0, 2*n, 0, 0},
{0, 0, 0, 1, 0, 0}, {0, -2*n, 0, 0, 0, 0}, {0, 0, 0, 0, 0, 1},
{0, 0, 0, 0, -n^2, 0}}, {{0, 0, 0}, {1, 0, 0}, {0, 0, 0}, {0, 1, 0}, {0, 0, 0},
{0, 0, 1}}, {{1, 0, 0, 0, 0, 0}, {0, 1, 0, 0, 0, 0}, {0, 0, 1, 0, 0, 0}},
{{0, 0, 0}, {0, 0, 0}, {0, 0, 0}}}, SamplingPeriod -> None, SystemsModelLabels -> None];Use DSolveValue to obtain the closed relative orbits from a particular set of launch conditions:
n = 0.001;Subscript[x, 0] = 1;Subscript[xd, 0] = 0.0005;
x = Map[DSolveValue[{{0, 0, 0} -> sat, {Subscript[x, 0], Subscript[xd, 0], (2Subscript[xd, 0]/n), -2n Subscript[x, 0], Sequence@@##}}, "StateResponse", {t, 0, 5 (2Pi/n)}]&, {{-2 Subscript[x, 0], -2 Subscript[xd, 0]}, {2 Subscript[x, 0], 2 Subscript[xd, 0]}}];ParametricPlot3D[{x[[1, 1 ;; 5 ;; 2]], x[[2, 1 ;; 5 ;; 2]]}, {t, 0, 5 (2Pi/n)}, BoxRatios -> {1, 1, 1}, AxesLabel -> {"X", "Y", "Z"}]Properties & Relations (12)
DSolveValue returns an expression for the solution:
DSolveValue[{y'[x] == y[x], y[0] == 1}, y[x], x]DSolve returns a rule for the solution:
DSolve[{y'[x] == y[x], y[0] == 1}, y[x], x]Solutions satisfy the differential equation and boundary conditions:
sol = DSolveValue[{y''[x] - y[x] == 0, y[0] == 1, y'[0] == 4}, y, x]Simplify[{y''[x] - y[x] == 0, y[0] == 1, y'[0] == 4} /. y -> sol]Differential equation corresponding to Integrate:
DSolveValue[y'[x] == Exp[x ^ 2], y[x], x]Integrate[Exp[x ^ 2], x]Use NDSolveValue to find a numerical solution:
exactsol = DSolveValue[{y''[x] + y[x] == 0, y[0] == 1, y'[0] == 0}, y, x]Table[exactsol[x], {x, -2., 2}]numsol = NDSolveValue[{y''[x] + y[x] == 0, y[0] == 1, y'[0] == 0}, y, {x, -2, 2}]Table[numsol[x], {x, -2., 2}]Use AsymptoticDSolveValue to find an asymptotic expansion:
dsol = DSolveValue[{y'[x] - 2y[x] == 0, y[0] == 1}, y[x], x]Series[%, {x, 0, 4}]//NormalAsymptoticDSolveValue[{y'[x] - 2y[x] == 0, y[0] == 1}, y[x], {x, 0, 4}]Use DEigensystem to find eigenvalues and eigenfunctions:
{ℒ, ℬ} = {-Laplacian[u[x], {x}], DirichletCondition[u[x] == 0, True]};Find the complete eigensystem:
DSolveValue[{u''[x] + λ u[x] == 0, u[0] == 0, u[π] == 0}, u[x], x]Find eigenvalues and eigenfunctions:
DEigensystem[{ℒ, ℬ}, u[x], {x, 0, Pi}, 3]Compute an impulse response using DSolveValue:
DSolveValue[y'''[x] - 5y''[x] + 9y'[x] - 5y[x] == DiracDelta''[x] + 2DiracDelta'[x] + DiracDelta[x] && y[-1] == 0 && y'[-1] == 0 && y''[-1] == 0, y[x], x]//FullSimplifyThe same computation using InverseLaplaceTransform:
InverseLaplaceTransform[(s ^ 2 + 2s + 1/s ^ 3 - 5s ^ 2 + 9s - 5), s, x]//FullSimplifyApply N[DSolveValue[…]] to invoke NDSolveValue if symbolic solution fails:
DSolveValue[{y''[x] + x ^ 2 y'[x] + Tan[y[x]] == 1, y[0] == 1, y'[0] == 1}, y, {x, 0, 1}]sol = N[%]Table[sol[x], {x, 0, 1, 0.2}]CompleteIntegral finds a complete integral for a nonlinear PDE:
deqn = D[u[x, y], x] + D[u[x, y], y] ^ 2 == 3;CompleteIntegral[deqn, u[x, y], {x, y}]DSolveValue returns the same solution with a warning message:
DSolveValue[deqn, u[x, y], {x, y}]Use CompleteIntegral to find a complete integral for a linear PDE:
deqn = D[u[x, y], x] + 2D[u[x, y], y] == 1;CompleteIntegral[deqn, u[x, y], {x, y}]DSolveValue returns the general solution for this PDE:
DSolveValue[deqn, u[x, y], {x, y}]Use DFixedPoints to find the fixed points of a system of two ODEs:
DFixedPoints[{x'[t] == -x[t] - y[t] - 1, y'[t] == 2x[t] - y[t] + 5}, {x, y}, t]Use DStabilityConditions to analyze the stability of the fixed point:
DStabilityConditions[{x'[t] == -x[t] - y[t] - 1, y'[t] == 2x[t] - y[t] + 5}, {x, y}, t]Solve the system using the fixed point as initial condition:
DSolveValue[{x'[t] == -x[t] - y[t] - 1, y'[t] == 2x[t] - y[t] + 5, x[0] == -2, y[0] == 1}, {x[t], y[t]}, t]//SimplifySolve the system for given initial conditions:
sol = DSolveValue[{x'[t] == -x[t] - y[t] - 1, y'[t] == 2x[t] - y[t] + 5, x[0] == 3, y[0] == -2}, {x[t], y[t]}, t]//SimplifyPlot[Evaluate[sol], {t, 0, 20}]Use system modeling for numerical solutions to larger hierarchical models:
sim = SystemModelSimulate[[image]]Plot the most interesting simulation result variables:
SystemModelPlot[sim]Possible Issues (5)
DSolveValue returns only a single branch if the solution has multiple branches:
DSolveValue[{y'[x] + y[x] == Sin[x], y'[0] ^ 2 == 1}, y[x], x]Use DSolve to get all of the solution branches:
DSolve[{y'[x] + y[x] == Sin[x], y'[0] ^ 2 == 1}, y[x], x]Results may contain inactive integrals:
sol = DSolveValue[y'[x] == f[x], y[x], x]Replacing the function ![]() by an expression still returns inactive integrals:
by an expression still returns inactive integrals:
sol /. f -> Function[x, 0]Use Activate to evaluate integrals:
Activate[%]Capital ![]() and capital
and capital ![]() cannot be used as independent variables:
cannot be used as independent variables:
DSolveValue[x'[K] == K ^ K, x[K], K]DSolveValue[x'[C] == C ^ C, x[C], C]Replacing them by lowercase ![]() or lowercase
or lowercase ![]() fixes the issue:
fixes the issue:
DSolveValue[x'[k] == k ^ k, x[k], k]DSolveValue[x'[c] == c ^ c, x[c], c]Definitions for an unknown function may affect the evaluation:
y[x_] := Cos[x]DSolveValue[{y'[x] == 0, y[0] == 1}, y, x]Clearing the definition for the unknown function fixes the issue:
Clear[y]DSolveValue[{y'[x] == 0, y[0] == 1}, y[x], x]Solve a second-order linear ODE with symbolic parameters:
eqn = y''[x] + (k + g1 / (a + x)) y'[x] + (m + g2 / (a + x)) y[x] == 0;sol = DSolveValue[eqn, y[x], x]The solution obtained is not the general solution of the ODE for specific values of parameters ![]() :
:
sol /. {g1 -> 0, g2 -> 0}//SimplifyThe general solution for this case can be found by substituting parameter values in the equation first:
DSolveValue[eqn /. {g1 -> 0, g2 -> 0}, y[x], x]Neat Examples (2)
{x, y, t} = DSolveValue[{x'[s] == Cos[t[s]], y'[s] == Sin[t[s]], t'[s] == s, x[0] == 0, y[0] == 0, t[0] == 0}, {x, y, t}, s]ParametricPlot[{x[s], y[s]}, {s, -10, 10}]Solve the sixth symmetric power of the Legendre differential operator:
sol = DSolveValue[(-((192n(1 + n)x ^ 5) / (1 - x ^ 2) ^ 6) + (2496n(1 + n)x ^ 3) / (1 - x ^ 2) ^ 5 - (8160n ^ 2(1 + n) ^ 2x ^ 3) / (1 - x ^ 2) ^ 5 - (1632n(1 + n)x) / (1 - x ^ 2) ^ 4 + (7824n ^ 2(1 + n) ^ 2x) / (1 - x ^ 2) ^ 4 - (6912n ^ 3(1 + n) ^ 3x) / (1 - x ^ 2) ^ 4)y[x] + ((64x ^ 6) / (1 - x ^ 2) ^ 6 - (1824x ^ 4) / (1 - x ^ 2) ^ 5 + (8256n(1 + n)x ^ 4) / (1 - x ^ 2) ^ 5 + (2880x ^ 2) / (1 - x ^ 2) ^ 4 - (19200n(1 + n)x ^ 2) / (1 - x ^ 2) ^ 4 + (22896n ^ 2(1 + n) ^ 2x ^ 2) / (1 - x ^ 2) ^ 4 - 272 / (1 - x ^ 2) ^ 3 + (2208n(1 + n)) / (1 - x ^ 2) ^ 3 - (4384n ^ 2(1 + n) ^ 2) / (1 - x ^ 2) ^ 3 + (2304n ^ 3(1 + n) ^ 3) / (1 - x ^ 2) ^ 3)
y'[x] + (-((2016x ^ 5) / (1 - x ^ 2) ^ 5) + (9408x ^ 3) / (1 - x ^ 2) ^ 4 - (19488n(1 + n)x ^ 3) / (1 - x ^ 2) ^ 4 - (3696x) / (1 - x ^ 2) ^ 3 + (12768n(1 + n)x) / (1 - x ^ 2) ^ 3 - (9408n ^ 2(1 + n) ^ 2x) / (1 - x ^ 2) ^ 3)y''[x] + ((4816x ^ 4) / (1 - x ^ 2) ^ 4 - (7168x ^ 2) / (1 - x ^ 2) ^ 3 + (9632n(1 + n)x ^ 2) / (1 - x ^ 2) ^ 3 + 616 / (1 - x ^ 2) ^ 2 - (1456n(1 + n)) / (1 - x ^ 2) ^ 2 + (784n ^ 2(1 + n) ^ 2) / (1 - x ^ 2) ^ 2)y'''[x] + (-((2800x ^ 3) / (1 - x ^ 2) ^ 3) + (1400x) / (1 - x ^ 2) ^ 2 - (1400n(1 + n)x) / (1 - x ^ 2) ^ 2)
y''''[x] + ((560x ^ 2) / (1 - x ^ 2) ^ 2 - 70 / (1 - x ^ 2) + (56n(1 + n)) / (1 - x ^ 2))y'''''[x] - (42x y''''''[x]) / (1 - x ^ 2) + y'''''''[x] == 0, y[x], x]Text
Wolfram Research (2014), DSolveValue, Wolfram Language function, https://reference.wolfram.com/language/ref/DSolveValue.html (updated 2026).
CMS
Wolfram Language. 2014. "DSolveValue." Wolfram Language & System Documentation Center. Wolfram Research. Last Modified 2026. https://reference.wolfram.com/language/ref/DSolveValue.html.
APA
Wolfram Language. (2014). DSolveValue. Wolfram Language & System Documentation Center. Retrieved from https://reference.wolfram.com/language/ref/DSolveValue.html